Что такое передаточное число редуктора – расчет параметров и рекомендации по подбору приводного механизма
Передаточное отношение — Википедия
Передаточное отношение (i{\displaystyle i}) — одна из важных характеристик механической передачи вращательного движения. Передаточное отношение показывает, во сколько раз вырос момент силы на ведомом валу по сравнению с ведущим.
i=i12=d2d1=z2z1=M2M1=ω1ω2=n1n2{\displaystyle i=i_{12}={\frac {d_{2}}{d_{1}}}={\frac {z_{2}}{z_{1}}}={\frac {M_{2}}{M_{1}}}={\frac {\omega _{1}}{\omega _{2}}}={\frac {n_{1}}{n_{2}}}}где: i12{\displaystyle i_{12}} — передаточное отношение от звена 1 к звену 2 (звено 1 — ведущее, звено 2 — ведомое)
d1,d2{\displaystyle d_{1},d_{2}} — диаметры звеньев
z1,z2{\displaystyle z_{1},z_{2}} — количество зубьев звеньев (если таковые имеются)
M1,M2{\displaystyle M_{1},M_{2}} — крутящие моменты звеньев
ω1,ω2{\displaystyle \omega _{1},\omega _{2}} — угловые скорости звеньев
n1,n2{\displaystyle n_{1},n_{2}} — частоты вращения звеньев
Таким образом, если передаточное отношение больше единицы, то передача увеличивает момент силы на ведомом валу, но
Поэтому редуктор с передаточным отношением больше единицы называется понижающим.
Размышляя о моменте силы, становится понятным следующее соотношение для многоступенчатых передач:
i=i14=i12⋅i23⋅i34=M2M1⋅M3M2⋅M4M3=M4M1{\displaystyle i=i_{14}=i_{12}\cdot i_{23}\cdot i_{34}={\frac {M_{2}}{M_{1}}}\cdot {\frac {M_{3}}{M_{2}}}\cdot {\frac {M_{4}}{M_{3}}}={\frac {M_{4}}{M_{1}}}}Однако следует учесть, что данное выражение истинно только в случае отсутствия потерь в зацеплении и других подвижных частях механизма на трение, упругие деформации и другие факторы, что в принципе является невозможным. Поэтому при конструкторских расчетах силовых и кинематических параметров машин необходимо учитывать коэффициент полезного действия как непосредственно самой передачи, так и пар подшипников, а если они есть, то и соединительных муфт. С учетом этого общая формула для определения момента на выходном валу имеет вид [4, с. 12]:
ii,i+1⋅Mi⋅η=Mi+1,{\displaystyle i_{i,i+1}\cdot M_{i}\cdot \eta =M_{i+1},}
где ii,i+1{\displaystyle i_{i,i+1}} — передаточное отношение механизма;
Mi,Mi+1{\displaystyle M_{i},M_{i+1}} — крутящие моменты на входном и выходном валах механизма соответственно;
η{\displaystyle \eta } — КПД механизма.
Следующий абзац возник из-за некоторого разногласия в рядах студентов по поводу ведущего и ведомого звена.
Из курсового проектирования деталей машин [5, с. 118]: «Как правило ременная и цепная передачи служат для понижения частоты вращения. Специальные передачи, повышающие угловую скорость, здесь не рассматриваются, так как в типовых заданиях на курсовое проектирование они не встречаются.»
В этой же книге [4, с. 7] дана формула i=nnomnp{\displaystyle i={\frac {n_{nom}}{n_{p}}}}. Здесь в качестве номинальной nnom{\displaystyle n_{nom}} частоты принимается частота работы электропривода (то есть
Проверка: редуктор, передаточное число которого больше единицы (2>1), скорость понижается (n2<n1), i=ω1ω2=n1n2=2 m/c1 m/c=2{\displaystyle i={\frac {\omega _{1}}{\omega _{2}}}={\frac {n_{1}}{n_{2}}}={\frac {2~m/c}{1~m/c}}=2}. (Момент силы увеличивается)
В случае зубчатых шестерён передаточное отношение всегда является рациональным числом. Характеристика передаточное отношение применима как к механической передаче с одной ступенью (одной кинематической парой), так и к механическим передачам со множеством ступеней. Во втором случае передаточное отношение всей механической передачи будет равно произведению передаточных отношений всех ступеней.
Формально механизмы с передаточным отношением больше единицы называются редукторами, с передаточным отношением меньше единицы — мультипликаторами. Фактически и тот, и другой механизм в обиходе можно называть редуктором, добавляя лишь определение «понижающий» в случае с (i>1{\displaystyle i>1}) и «повышающий» с (i<1{\displaystyle i<1}).
- Под ред. Скороходова Е. А. Общетехнический справочник. — М.: Машиностроение, 1982. — С. 416.
- Гулиа Н. В., Клоков В. Г., Юрков С. А. Детали машин. — М.: Издательский центр «Академия», 2004. — С. 416. — ISBN 5-7695-1384-5.
- Анурьев В. И. Справочник конструктора-машиностроителя: В 3 т. / Под ред. И. Н. Жестковой. — 8-е изд., перераб. и доп.. — М.: Машиностроение, 2001. — ISBN 5-217-02962-5.
- Курмаз Л. В.
- Чернавский С. А., Боков К. Н. Курсовое проектирование деталей машин. — 1988.
Передаточное число — Википедия
Материал из Википедии — свободной энциклопедии
Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 14 декабря 2017; проверки требуют 6 правок. Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 14 декабря 2017; проверки требуют 6 правок.Передаточное число зубчатой передачи — это отношение числа зубьев колеса к числу зубьев шестерни[1 1] (согласно ГОСТ 16530-83, принятого взамен ГОСТ 16530-70).
u = z2 / z1 ,
где z1 – число зубьев шестерни;
z2 – число зубьев колеса.
Шестерня – зубчатое колесо передачи с меньшим числом зубьев. Примечание: при одинаковом числе зубьев зубчатых колёс передачи шестерней называется ведущее зубчатое колесо[1 2].
Колесо – зубчатое колесо передачи с большим числом зубьев. Примечание: при одинаковом числе зубьев зубчатых колёс передачи колесом называется ведомое зубчатое колесо[1 3].
Также ГОСТ 16530-83 вводит следующие определения:
Парное зубчатое колесо – зубчатое колесо передачи, рассматриваемое по отношению к другому зубчатому колесу данной передачи[1 4].
Ведущее зубчатое колесо – зубчатое колесо передачи, которое сообщает движение парному зубчатому колесу[1 5].
Ведомое зубчатое колесо – зубчатое колесо передачи, которому сообщает движение парное зубчатое колесо[1 6].
Таким образом, если ведущее колесо имеет меньшее число зубьев, чем ведомое (передача представляет собой редуктор), то ведущее колесо будет являться шестерней, а ведомое – колесом. Если же ведущее колесо имеет большее число зубьев, чем ведомое (передача представляет собой мультипликатор), то ведущее колесо будет являться колесом, а ведомое – шестерней.
Передаточное число и передаточное отношение[править | править код]
 Данная зубчатая передача имеет колесо с 28 зубьями и шестерню с 10 зубьями.
Данная зубчатая передача имеет колесо с 28 зубьями и шестерню с 10 зубьями.Ввиду того, что из рисунка не ясно, какое из двух звеньев является ведущим, а какое ведомым, передаточное отношение ( i ) данной передачи не очевидно и может быть равно как 2.8, так и 0.357. Передаточное число однозначно равно 2.8
Не следует путать передаточное число с передаточным отношением.
Передаточным отношением механической передачи называется отношение угловой скорости ведущего звена к угловой скорости ведомого звена. Передаточное отношение, определяемое в направлении потока мощности от ведущего звена к ведомому определяется по формуле[1]
:
u12 = ω1 / ω 2 = n1 / n 2 ,
где ω 1 – угловая скорость ведущего звена, с -1(или рад/с);
ω 2 – угловая скорость ведомого звена, с -1(или рад/с).
n 1 – частота вращения ведущего звена, мин -1(или об/мин);
n 2 – частота вращения ведомого звена, мин -1(или об/мин).
В случае, если передаточное отношение больше 1 (u12 >1, ω1 > ω 2), то передача понижающая и механизм представляет собой редуктор. Если же значение передаточного отношения меньше 1 (u12 <1, ω1 < ω 2), то механизм представляет собой мультипликатор.[2]
Передаточное число в отличие от передаточного отношения всегда положительное и не может быть меньше единицы. Передаточное число характеризует передачу только количественно. Передаточное число и передаточное отношение могут совпадать только у передачи внутреннего зацепления. У передач внешнего зацепления они не совпадают, так как имеют разные знаки: передаточное отношение – отрицательное, а передаточное число – положительное. Наиболее распространены понижающие передачи, так как частота вращения исполнительного механизма в большинстве случаев меньше частоты вращения вала двигателя.
- ↑ Фещенко В. Н. Справочник конструктора. Книга 1. Машины и механизмы: учебно-практическое пособие / В. Н Фещенко. — 3-е изд. ипр. и доп. — М.: Инфра-Инженерия, 2019. — С. 22. — 400 с. — ISBN 978-5-9729-0252-1.
- ↑ Фещенко В. Н. Справочник конструктора. Книга 1. Машины и механизмы: учебно-практическое пособие / В. Н Фещенко. — 3-е изд. ипр. и доп. — М.: Инфра-Инженерия, 2019. — С. 22-23. — 400 с. — ISBN 978-5-9729-0252-1.
- ↑ Фещенко В. Н. Справочник конструктора. Книга 1. Машины и механизмы: учебно-практическое пособие / В. Н Фещенко. — 3-е изд. ипр. и доп. — М.: Инфра-Инженерия, 2019. — С. 23. — 400 с. — ISBN 978-5-9729-0252-1.
- Межгосударственный стандарт. ГОСТ 16530-83 Передачи зубчатые; общие термины, определения, обозначения. — официальное. — Москва: ИПК Издательство стандартов, 1983. — 50 p.
Ошибка в сносках?: Для существующих тегов <ref> группы «1» не найдено соответствующего тега <references group="1"/> или пропущен закрывающий тег </ref>
Механический редуктор — Википедия
 Канонический вид механического редуктора
Канонический вид механического редуктораВедущее зубчатое колесо — В
Ведомое зубчатое колесо — А
Реду́ктор (механический)

Работа любого редуктора подпадает под действие Золотого правила механики: редуктор практически не изменяет передаваемую вращением мощность (с поправкой на КПД), а лишь взаимообратно изменяет две её составляющие — крутящий момент и угловую скорость. Величина изменения определяется передаточным отношением. При этом редукция усилия предполагает, что крутящий момент на входе в редуктор будет меньше, чем на выходе с него, а угловая скорость, соответственно, наоборот — на входе будет больше чем на выходе. Передаточное отношение любого подобного редуктора больше единицы, а сам термин «редуктор», упомянутый без каких-либо дополнительных определений к нему, подразумевает именно редуктор подобного плана.
В редких случаях (в основном, из компоновочных соображений) в технике применяются редукторы с передаточным отношением меньше единицы. Такой редуктор в русскоязычном речевом обиходе называется «повышающим редуктором». Определение «повышающий» здесь происходит как от факта повышения усилия, необходимого для привода конечного устройства, так и от повышения угловой скорости ведомой шестерни в таком редукторе. Формально, исходя из этимологии термина «редуктор», термин «повышающий редуктор» есть оксюморон, но фактически распространённого синонима в русском языке нет, а, возможно, более подходящий сюда термин «мультипликатор» в обиходе практически не используется и малопонятен. При этом такой термин как «повышающая передача» официально зафиксирован ГОСТ-ом и правомерно присутствует в инженерно-техническом лексиконе.
Таковыми являются: тип передачи, тип зацепления, КПД, передаточное отношение, величина передаваемой мощности (номинальный крутящий момент на тихоходном валу и максимальные окружные скорости зубчатых колёс), число ступеней редукции.
Классификация редукторов по ГОСТу[править | править код]
Прежде всего редукторы классифицируются по типам механических передач: цилиндрические, конические, червячные, планетарные, волновые, спироидные и комбинированные.
Также редукторы можно классифицировать по типу корпусов, по способу охлаждения, по типам используемых подшипников, по скоростям вращения, передаточному числу; передаваемой мощности.
Корпуса редукторов[править | править код]
В серийном производстве широко распространены стандартизованные литые корпуса редукторов. Чаще всего в тяжёлой промышленности и машиностроении применяются корпуса из литейного чугуна, реже из литейных сталей. Когда требуется максимально облегчить конструкцию применяют легкосплавные корпуса. На корпусе редуктора чаще всего имеются места крепления — лапы и/или уши, за которые перемещают и/или крепят редукторы к основанию. На выходе валов располагают уплотнения для предотвращения вытекания масла. На корпусах редукторов зачастую располагают конструкционные элементы, предотвращающие увеличение давления внутри редуктора, возникающее от нагрева редуктора при его работе.
В штучном производстве широко используются сварные корпуса, позволяющие получать индивидуальные конструктивные решения.
Передаточное отношение[править | править код]
В дополнение к общему определению передаточного отношения, предполагающему отношение угловых скоростей ведущей и ведомого валов i=ω1/ω2{\displaystyle i=\omega _{1}/\omega _{2}}, в любом механическом редукторе на зубчатых колёсах таковое может быть подсчитано без замеров угловых скоростей по формулам, учитывающим число зубьев. Для определения передаточного отношения любого редуктора из двух взаимозацепленных зубчатых колёс, независимо от их формы и типа зацепления (цилиндрического, конического, гипоидного, червячного), верна формула вида z2/z1{\displaystyle z_{2}/z_{1}} где z1{\displaystyle z_{1}} — число зубьев ведущего зубчатого колеса (число заходов червяка), а z2{\displaystyle z_{2}} — число зубьев ведомого зубчатого колеса. Передаточное отношение планетарного редуктора определить таким образом также возможно, хотя оно не имеет единой формулы подсчёта, и для его определения по числу зубьев всегда надо понимать, какое звено планетарного редуктора является ведущим/ведомым/опорным, а также учитывать тип и форму конкретного планетарного механизма.
Общее передаточное отношение всех редукторов, задействованных в конкретной кинематической цепи, равно произведению их передаточных отношений.
Редуктор со ступенчатым изменением передаточного отношения называется коробкой передач, с бесступенчатым — вариатор.
Все о редукторах. Справочная информация
Классификация, основные параметры редукторов
Цилиндрические редукторы
Червячные редукторы
Планетарные редукторы
Конические редукторы
Классификация редукторов в зависимости от вида передач и числа ступеней
Конструкция и назначение редуктора
Особенности редукторов по виду механических передач
Количество ступеней редуктора
Входные и выходные валы редукторов
Срок службы редуктора
Устройство редуктора
Монтажное исполнение
Как подобрать редуктор? Простые правила и примеры расчета
Передаточное отношение и как его определить?
Редукторы (латинского слова reductor) получили широкое распространение во всех отраслях промышленного и аграрного хозяйства, поэтому их производство с каждым годом увеличивается, появляются новые модификации, совершенствуются уже существующие модели.
Редуктор служит для снижения частоты вращения тихоходного вала и увеличения усилия на выходном валу. Редуктор может иметь одну или несколько ступеней, цель которых увеличение передаточного отношения. По типу механической передачи редукторы могут быть червячными, коническими, планетарными или цилиндрическими. Конструктивно редуктор выполнен как отдельное изделие, работающее в паре с электродвигателем и установленное с ним на одной раме.
Промышленностью сегодня выпускаются редукторы общего и специального назначения.
Редукторы общего назначения могут применяться во многих случаях и отвечают общим требованиям. Специальные же редукторы имеют нестандартные характеристики подходящие под определенные требования.
Классификация, основные параметры редукторов
В зависимости от типа зубчатой передачи редукторы бывают цилиндрические, конические, волновые, планетарные, глобоидные и червячные. Широко применяются комбинированные редукторы, состоящие из нескольких совмещенных в одном корпусе типов передач (цилиндро-конические, цилиндро-червячные и т.д.).
Конструктивно редукторы могут передавать вращение между перекрещивающимися, пересекающимися и параллельными валами.
Так, например цилиндрические редукторы позволяют передать вращение между параллельными валами, конические — между пересекающимися, а червячные — между пересекающимися валами.
Общее передаточное число может достигать до нескольких десятков тысяч, и зависит от количества ступеней в редукторе. Широкое применение нашли редукторы, состоящие из одной, двух или трех ступеней, при чем они могут, как описывалось выше, совмещать разные типы зубчатых передач.
Ниже представлены наиболее популярные виды редукторов, серийно выпускаемые промышленностью.
Цилиндрические редукторы
Цилиндрические редукторы являются самыми популярными в машиностроении. Они позволяют передавать достаточно большие мощности, при этом КПД достигает 95%. Вращение передается между параллельными или соосными валами. Передаваемая мощность зависит от типоразмера редуктора. В цилиндрических редукторах применяются передачи, состоящие из прямозубых, косозубых или шевронных зубчатых колес. Количество цилиндрических передач напрямую влияет на передаточное отношение. Например, одноступенчатый редуктор может иметь передаточное число 1,5 до 10, две ступени — от 10 до 60, а три ступени — от 60 до 400.
Кинематические схемы наиболее распространенных видов цилиндрических редукторов представлены на рисунке ниже:
А) — Простой одноступенчатый цилиндрический редуктор
Б) – Двухступенчатый редуктор цилиндрический с несимметричным расположением зубчатых колес
В) – Трехступенчатый цилиндрический редуктор, входной вал быстроходной передачи изготовлен с двумя шестернями
Г) – Соосный цилиндрический редуктор
Д) — Соосный цилиндрический редуктор с симметричным расположением опор относительно тихоходной передачи
Е) — Соосный цилиндрический редуктор с шевронной быстроходной передачей
Ж) — Соосный цилиндрический редуктор с раздвоенной передачей
З) — Соосный цилиндрический редуктор с посаженными на быстроходный вал двумя косозубыми шестернями с противоположенным наклоном зубьев
И) – Трехступенчатый цилиндрический редуктор с раздвоенной быстроходной и тихоходной передачей
Червячные редукторы
Червячные редукторы получили большую популярность в виду своей простоты и достаточно низкой стоимости. Из всех видов червячных редукторов наиболее распространены редукторы с цилиндрическими или глобоидными червяками. Как и многие другие типы редукторов червячные могут состоять из одной или нескольких ступеней. На одноступенчатом редукторе передаточное отношение может быть в пределах 5-100, а на двух ступенях может достигать 10000. Основными достоинствами редукторов червячного типа являются компактные размеры, плавность хода и самоторможение. Из недостатков можно отметить не очень высокий КПД и ограниченная нагружаемая способность. Основными элементами являются зубчатое колесо и цилиндрический червяк. Цилиндрический червяк представляет собой винт с нанесенной на его поверхности резьбой определенного профиля. Число заходов зависит от передаточного отношения, и может составлять от 1 до 4. Вторым основным элементом редуктора является червячное колесо. Оно представляет собой зубчатое колесо из сплава бронзы, количество зубьев также зависит от передаточного отношения и может составлять 26-100.
В ниже приведенной таблице представлена зависимость передаточного отношения от количества зубов колеса и заходов винта.
Передаточное отношение | Число заходов червяка | Число зубов колеса |
7-8 | 4 | 28-32 |
9-13 | 3-4 | 27-52 |
14-24 | 2-3 | 28-72 |
15-27 | 2-3 | 50-81 |
28-40 | 1-2 | 28-80 |
40 | 1 | 40 |
Кинематические схемы одноступенчатых червячных редукторов представлены ниже:
А) Редуктор с нижним расположением червяка
Б) Редуктор с верхним расположением червяка
В) Редуктор с боковым расположением червяка (ось червяка расположена горизонтально)
Г) Редуктор с боковым расположением червяка (ось червяка расположена вертикально)
Редукторы червячные двухступенчатые позволяют получить моменты в диапазоне 100 – 2800Нм. Конструкция представляет собой жесткую скрутку двух редукторов. Между собой редукторы соединены с помощью фланца. Цилиндрический вал первой ступени установлен в полый вал второй ступени.
Вариант расположения червячных пар представлен на рисунке ниже:
Расположение входного и выходного вала зависит от варианта сборки. Существуют следующие сборки: 11, 12, 13, 16, 21, 22, 23, 26.
Планетарные редукторы
Планетарные редукторы нашли широкое применение в тяжелом машиностроении, так как обладают рядом преимуществ перед редукторами другого типа. На редукторах планетарного типа можно получить достаточно большие передаточные числа, при этом габариты редуктора будут намного меньше чем у червячного или цилиндрического редуктора. Конструкция редуктора представляет собой планетарный механизм. Основными элементами редуктора являются сателлиты, солнечная шестерня, кольцевая шестерня и водило.
Внешний вид устройства планетарного редуктора представлен ниже:
А) сателлиты
Б) солнечная шестерня
В) водило
Г) кольцевая шестерня
Кольцевая шестерня планетарного редуктора находится в неподвижном состоянии, Вращение от входного вала передается на солнечную шестерню находящеюся в зацеплении со всеми сателлитами. Сателлиты вращаются внутри неподвижной кольцевой шестерни передавая энергию вращения на водило, а далее на выходной вал редуктора. Планетарный механизм может быть одно-, двух- и трехступенчатым, передаточное отношение зависит от количества зубьев на каждой шестерне.
Свое название планетарный редуктор получил благодаря тому, что зубчатые колеса вращаются подобно планетам солнечной системы. Планетарные редукторы могут быть одно-, двух- и трехступенчатыми. Передаточное отношение может быть в пределах 6 – 450. Редукторы планетарного типа обладают высоким КПД, и позволяют передавать большие мощности без потерь на нагрев. Для удобства монтажа планетарные редукторы выпускаются на лапах или на опорном фланце, а также возможен комбинированный вариант.
В настоящий момент на Российском рынке приводной техники пользуются популярностью редукторы серии 3МП и МПО.
Конические и цилиндро-конические редукторы
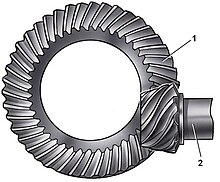
Конические и цилиндро-конические редукторы передают момент между пересекающимися или скрещивающимися валами. В редукторах применяются шестерни в виде конуса с прямыми или косыми зубами. Конические редукторы имеют большую плавность зацепления, что позволяет им выдерживать большие нагрузки. Редукторы могут быть одно-, двух- и трехступенчатыми. Большое распространение получили цилиндро-конические редукторы, где общее передаточное отношение может достигать 315. Быстроходный и тихоходный валы редуктора могут располагаться горизонтально и вертикально. По типу кинематической схемы конические и цилиндро-конические редукторы могут быть развернутые или соосные.
На рисунке ниже представлены кинематические схемы конических редукторов:
А) Реверсивный конический редуктор. Смена направления вращения достигается установкой зубчатого колеса с противоположенной стороны конической шестерни.
Б) Реверсивный конический редуктор. Конические шестерни вращаются в разных направлениях. Подключение тихоходного вала к одной из конических шестеренок происходит за счет кулачковой муфты.
В) Двухступенчатый коническо-цилиндрический редуктор. Быстроходный и тихоходный валы находятся под прямым углом в одной плоскости.
Г) Двухступенчатый коническо-цилиндрический редуктор. Входной и выходные валы перекрещиваются и лежат в разных плоскостях.
Д) Трехступенчатый коническо-цилиндрический редуктор. Быстроходный и тихоходный валы находятся под прямым углом в одной плоскости.
Е) Трехступенчатый коническо-цилиндрический редуктор. Промежуточная и тихоходная цилиндрическая передача собраны по соосной схеме.
Конические редукторы широко используются в изделиях, где требуются передать высокий момент под прямым углом. В отличие от червячных редукторов, конические редукторы не имеют быстро изнашиваемого бронзового колеса, что позволяет работать им в тяжелых условиях длительное время. Также важным отличием является обратимость, возможность передавать вращение от тихоходного вала к быстроходному валу. Обратимость позволяет разгрузить редукторный механизм в отличие от червячного редуктора, что позволяет использовать конический редуктор в установках с высокой инерцией.
Классификация редукторов в зависимости от вида передач и числа ступеней:
Тип редуктора | Количество ступеней | Тип механической передачи | Расположение тихоходного и быстроходного валов |
Цилиндрический | Одна ступень | Одна или несколько цилиндрических передач | Параллельное |
Две ступени; три ступени | Параллельное или соосное | ||
Четыре ступени | Параллельное | ||
Конический | Одна ступень | Одна коническая передача | Пересекающееся |
Коническо-цилиндрический | Две ступени; три ступени; четыре ступени | Одна коническая передача и одна или несколько цилиндрических передач | Пересекающееся или скрещивающееся |
Червячный | Одна ступень; две ступени | Одна или две червячные передачи | Скрещивающееся |
Параллельное | |||
Цилиндрическо-червячный или червячно-цилиндрический | Две ступени; три ступени | Одна или две цилиндрические передачи и одна червячная передача | Скрещивающееся |
Планетарный | Одна ступень; две ступени; три ступени | Каждая ступень состоит из двух центральных зубчатых колес и сателлитов | Соосное |
Цилиндрическо-планетарный | Две ступени; три ступени; четыре ступени | Сборка из одной или нескольких цилиндрических и планетарных передач | Параллельное или соосное |
Коническо-планетарный | Две ступени; три ступени; четыре ступени | Сборка из одной конической и планетарных передач | Пересекающееся |
Червячно-планетарный | Две ступени; три ступени; четыре ступени | Сборка из одной конической и планетарных передач | Скрещивающееся |
Волновой | Одна ступень | Одна волновая передача | Соосное |
Конструкция и назначение редуктора
Механизм, служащий для понижения угловой скорости и одновременно повышающий крутящий момент, принято называть редуктором. Энергия вращения подводится на входной вал редуктора, далее в зависимости от передаточного отношения на выходном валу получаем пониженную частоту и увеличенный момент.
В состав редуктора в зависимости от типа механической передачи обычно входят зубчатые или червячные пары, центрирующие подшипники, валы, различные уплотнения, сальники и т.д. Элементы редуктора помещаются в корпус, состоящий из двух частей – основания и крышки. Рабочие механизмы редуктора при работе непрерывно смазываются маслом путем разбрызгивания, а в отдельных случаях применяется принудительный насос, помещенный внутрь редуктора.
Существует огромное количество различных типов редукторов, но наибольшую популярность получили цилиндрические, планетарные, конические и червячные редукторы. Каждый тип редуктора имеет свои определенные преимущества и недостатки, которые следует учитывать при конструировании оборудования. Основными же критериями для подбора редуктора являются определение необходимой мощности или момента нагрузки, коэффициента редукции (передаточного отношения), а также монтажного расположения источника вращения и рабочего механизма.
Особенности редукторов по виду механических передач
Мировой промышленностью выпускается огромное количество редукторов и редукторных механизмов различающихся по типу передачи, вариантам сборки и т.д. Рассмотрим основные типы механических передач, их особенности и преимущества.
Цилиндрическая передача – является самой надежной и долговечной из всех видов зубчатых передач. Данная передача применяется в редукторах, где требуется высокая надежность и высокий КПД. Цилиндрические передачи обычно состоят из прямозубых, косозубых или шевронных зубчатых колёс.
а) Прямозубая цилиндрическая передача
б) Косозубая цилиндрическая передача
в) Шевронная цилиндрическая передача
г) Цилиндрическая передача с внутренним зацеплением
Конические передачи – обладают всеми преимуществами цилиндрических зубчатых передач и применяются в случае перекрещивания входного и выходного валов.
а) Коническая зубчатая передача с прямым зубом
б) Коническая зубчатая передача с косым зубом
в) Коническая зубчатая передача с криволинейным зубом
г) Коническая гипоидная передача
Червячная передача – позволяет передавать кинетическую энергию между пересекающимися в одной плоскости валами. Основными преимуществами данной передачи является высокий показатель передаточного отношения, самоторможение, компактные размеры. Недостатками являются низкий КПД, быстрый износ бронзового колеса, а также ограниченная способность передавать большие мощности.
Гипоидная передача – она же спироидная состоит из конического червяка и диска со спиральными зубьями. Ось червяка значительно смещена от оси конического колеса, благодаря чему число зубьев одновременно входящих в зацепление в несколько раз больше чем у червячных передач. В отличие от червячной пары в гипоидной передаче линия контакта перпендикулярна к направлению скорости скольжения, что обеспечивает масленый клин и уменьшает трение. Благодаря этому КПД гипоидной передачи выше, чем у червячной передачи на 25%.
а) Червячная передача с цилиндрическим червяком
б) Червячная передача с глобоидным червяком
в) Спироидная передача
г) Тороидно-дисковая передача
д) Тороидная передача внутреннего зацепления
Волновая передача – прототипом является планетарная передача с небольшой разницей количества зубов сателлита и неподвижного колеса. Волновая передача характеризуется высоким показателем передаточного отношения (до 350). Основными элементами волновой передачи являются гибкое колесо, жесткое колесо и волновой генератор. Под действием генератора гибкое колесо деформируется и происходит зацепление зубьев с жестким колесом. Волновые передачи широко применяются в точном машиностроении благодаря высокой плавности и отсутствия вибраций во время работы.
1) Зубчатое колесо с внутренними зубьями
2) Гибкое колесо с наружными зубьями соединенное с выходным валом редуктора
3) Генератор волн
Количество ступеней редуктора
Число ступеней редуктора напрямую влияет на передаточное отношение. В червячных редукторах наиболее распространены одноступенчатые пары. Цилиндрические же редукторы, состоящие из одной ступени, применяются реже, чем двух- или трехступенчатые редукторы. В производстве редукторов все чаще применяются комбинированные передачи, состоящие из разных типов передач, например коническо-цилиндрические редукторы.
Входные и выходные валы редукторов
В редукторах обычно применяются обычные прямые валы, имеющие форму тел вращения. На валы редукторов действуют внешние нагрузки, консольные нагрузки и усилия преодоления зацеплений. Крутящий момент на валу определяется рабочим крутящим моментом редуктора или реактивным крутящим моментом привода. Консольная нагрузка определяется способом соединения редуктора с двигателем, зависит от радиального или осевого усилия на вал. В ряде машин, к которым предъявляются особые требования в отношении габаритов или веса используются редукторы с полым валом. Полый вал редуктора позволяет располагать вал исполнительного механизма внутри редуктора, тем самым отпадает необходимость использовать переходные полумуфты и т.п.
Срок службы редуктора
Срок службы редуктора зависит от правильных расчетов параметров действующей нагрузки. Также на длительность работы влияет своевременное профилактическое обслуживание редуктора, замена масла и сальников. Регулярный профилактический осмотр позволит избежать незапланированного ремонта или замену редуктора. Уровень масла контролируется через смотровое окно в редукторе и при необходимости доливается до нужного уровня.
Ниже приведена таблица зависимости срока службы редуктора от типа передачи:
Тип передачи редуктора | Гарантированный ресурс в часах |
Цилиндрическая, планетарная, коническая, цилиндро-коническая | более 25000 |
Волновая, червячная, глобоидная | более 10000 |
Устройство редуктора
Основными элементами редуктора являются:
1. Прошедшие обработку зубчатые колеса с зубьями высокой твердости. Материалом обычно служит сталь марки (40Х, 40ХН ГОСТ 4543-71). В планетарных редукторах шестерни и сателлиты изготовлены из стали марки 25ХГМ ГОСТ 4543-71. Зубчатые венцы из стали 40Х. Червячные валы изготавливаются из стали марки ГОСТ 4543-71 – 18ХГТ, 20Х с последующей цементацией рабочих поверхностей. Венцы червячных редукторов изготавливают из бронзы Бр010Ф1 ГОСТ 613-79. Гибкое колесо волнового редуктора изготовлено из кованой стали 30ХГСА ГОСТ 4543-71.
2. Валы (оси) быстроходные, промежуточные и тихоходные. Материалом является — сталь марки (40Х, 40ХН ГОСТ 4543-71). В зависимости от варианта сборки выходные валы могут быть одно- и двухконцевыми, а также полыми со шпоночным пазом. Выходные валы планетарных редукторов изготовлены заодно с водилом последней ступени. Материалом служит чугун или сталь.
3. Подшипниковые узлы. Используются подшипники качения воспринимающие большие осевые и консольные нагрузки. Применяются обычно конические роликоподшипники.
4. Шлицевые, шпоночные соединения. Шлицевые соединения чаще применяются в червячных редукторах (выходной полый вал). Шпонки применяются для соединения валов с зубчатыми колесами, муфтами и другими деталями.
5. Корпуса редукторов. Корпуса и крышки редукторов выполняются методом литья. В качестве материалов используется чугун марки СЧ 15 ГОСТ 1412-79 или сплав алюминия АЛ11. Для улучшения отвода тепла корпуса редукторов снабжаются ребрами.
Монтажное исполнение
Соосный редуктор — входной и выходной вал находятся на одной оси
Червячный редуктор — входной и выходной вал находятся под прямым углом
Цилиндрический редуктор — входной и выходной вал находятся на параллельных осях
Коническо-цилиндрический редуктор — входной и выходной вал перекрещиваются
Монтажное положение соосных цилиндрических или планетарных редукторов
Монтажное положение и вариант сборки червячных одноступенчатых редукторов
Монтажное положение и вариант сборки червячных двухступенчатых редукторов
Монтажное положение и вариант сборки цилиндрических редукторов
Методика выбора редуктора в зависимости от нагрузки
Методика выбора редуктора заключается в грамотном расчете основных параметров нагрузки и условий эксплуатации.
Технические характеристики описаны в каталогах, а выбор редуктора делается в несколько этапов:
- выбор редуктора по типу механической передачи
- определение габарита (типоразмера) редуктора
- определение консольных и осевых нагрузок на входной и выходной валы
- определение температурного режима редуктора
На первом этапе конструктор определяет тип редуктора исходя из заданных задач и конструктивных особенностей будущего изделия. На этом же этапе закладываются такие параметры как: передаточное отношение, количество ступеней, расположение входного и выходного валов в пространстве.
На втором этапе следует определить межосевое расстояние. Исходные данные на каждый тип редуктора можно найти в каталоге. Следует помнить, что межосевое расстояние влияет на способность передать момент от двигателя к нагрузке.
Консольные и осевые нагрузки определяются уравнениями, а потом сравниваются со значениями в каталоге. В случае превышения расчетных нагрузок, на какой либо вал, редуктор выбирается на типоразмер выше.
Температурный режим определяется во время работы редуктора. Температура не должна превышать + 80° гр. при длительной работе редуктора с действующей нагрузкой.
Как выбрать редуктор?
Выбор редуктора должен производить квалифицированный сотрудник т.к. неправильные расчеты могут привести к поломке редуктора или сопутствующего оборудования. Грамотный выбор редуктора поможет избежать дальнейшие затраты на ремонт и покупку нового привода. Основными параметрами для выбора редуктора как было сказано выше, являются: тип редуктора, габарит или типоразмер, передаточное отношение, а также кинематическая схема.
Определить габарит редуктора можно с помощью каталога, где указаны максимальные значения крутящего момента для каждого типоразмера. Момент действующей нагрузки на редуктор определяется следующим выражением:
где:
M2 — выходной момент на валу редуктора (Н/М)
P1 — подводимая мощность на быстроходном валу редуктора (кВт)
Rd — динамический КПД редуктора (%)
n2 — частота вращения тихоходного вала (об/мин)
Частоту вращения тихоходного вала n2 можно определить, зная значения передаточного отношения редуктора i, а также значения скорости быстроходного вала n1.
где:
n1 — частота вращения быстроходного вала (об/мин)
n2 — частота вращения тихоходного вала (об/мин)
i — передаточное отношение редуктора
Еще одним важным фактором, который следует учитывать при подборе редуктора, является величина – сервис фактор (s/f). Сервис фактор sf – это отношение максимально допустимого момента M2 max указанного в каталоге к номинальному моменту M2 зависящего от мощности двигателя.
где:
M2 max — максимально допустимый момент (паспортное значение)
M2 — номинальный момент на валу редуктора (зависит от мощности двигателя)
Значение сервис фактора (s/f) напрямую связан с ресурсом редуктора и зависит от условий работы привода.
При работе редуктора с нормальной нагрузкой, где число стартов не превышает 60 пусков в час — сервис фактор может выбираться: sf = 1.
При средней нагрузке, где число стартов не превышает 150 пусков в час — сервис фактор выбирается: sf = 1,5.
При тяжелой ударной нагрузке с возможностью заклинивания вала редуктора сервис фактор выбирается: sf = 2 и более.
Передаточное отношение и как его определить?
Основное назначение любого редуктора понижение угловой скорости подводимой на его входной вал. Значения выходной скорости определятся передаточным отношением редуктора. Передаточное отношение редуктора — это отношение скорости входного вала к скорости выходного вала.
Червячный редуктор — Википедия
 Цилиндрическо-червячный редуктор в разрезе.
Цилиндрическо-червячный редуктор в разрезе.Червячный редуктор — это зубчатый механизм в корпусе, повышающий либо понижающий скорость вращения и усилия, преобразующее угловую скорость вращения и усилия вала двигателя, используя червячную передачу.
Редуктор червячный — один из классов механических редукторов. Редукторы классифицируются по типу шестерен механической передачи. Редуктор называется червячным по виду резьбы ведущего вала, вращение которого передает усилие на ведомую шестерню, червячная передача, находящейся внутри редуктора, передающей и преобразующей крутящий момент. Винт, который лежит в основе червячной передачи, имеет так называемую «червячную резьбу», отсюда и название. Червячный редуктор может быть с одной или более механическими планетарными передачами.
В червячном редукторе увеличение крутящего момента и уменьшение угловой скорости выходного вала происходит за счет преобразования энергии, заключенной в высокой угловой скорости и низком крутящем моменте на входном валу.
Двигатель со встроенным червячным редуктором называют червячным мотор-редуктором.
Наиболее распространены одноступенчатые червячные редукторы. При больших передаточных числах применяют либо двухступенчатые червячные редукторы, либо комбинированные червячно-зубчатые или зубчато-червячные редукторы. В одноступенчатых червячных редукторах червяк может располагаться под колесом, над колесом, горизонтально сбоку колеса и вертикально сбоку колеса. Выбор схемы червячного редуктора определяется требованиями компоновки. Червячные редукторы с нижним расположением червяка применяют при v1 < 5 м/с, с верхним — при v1 > 5 м/с. В червячных редукторах с боковым расположением червяка смазка подшипников вертикальных валов затруднена.
В червячных редукторах для повышения сопротивления заеданию применяют более вязкие масла, чем в зубчатых редукторах. При скоростях скольжения Vск < 7…10 м/с смазку червячных передач редукторов осуществляют окунанием червяка или колеса в масляную ванну. При нижнем расположении червяка уровень масла в ванне должен проходить по центру нижнего шарика или ролика подшипника качения, а червяк должен быть погружен в масло примерно на высоту витка. Если уровень масла устанавливают по подшипникам и червяк не окунается в масло, то на валу червяка устанавливают маслоразбрызгивающие кольца (крыльчатки), которые и подают масло на червяк и колесо. В червячных редукторах Vск < 7…10 м/с применяют циркуляционно-принудительную смазку, при которой масло от насоса через фильтр и холодильник подаётся в зону зацепления.
В червячных редукторах используется червячная передача. Червячная передача состоит из винта, называемого червяком, и червячного колеса, представляющего собой разновидность косозубого колеса.
Червячные передачи относятся к зубчато-винтовым. Если в зубчато-винтовой передаче углы наклона зубьев принять такими, чтобы зубья шестерни охватывали её вокруг, то эти зубья превращаются в витки резьбы, шестерня — в червяк, а передача — из винтовой зубчатой в червячную.
Ведущее звено червячной передачи в большинстве случаев — червяк, а ведомое — червячное колесо. Обратная передача зачастую невозможна — КПД червячного редуктора в совокупности с передаточным отношением вызывают самостопорение редуктора.
Преимущество червячной передачи по сравнению с винтовой зубчатой в том, что начальный контакт звеньев происходит по линии, а не в точке. Угол скрещивания валов червяка и червячного колеса может быть каким угодно, но обычно он равен 90°. В отличие от косозубого колеса обод червячного колеса имеет вогнутую форму, способствующую некоторому облеганию червяка и соответственно увеличению площади контактных поверхностей. Направление и угол подъёма зубьев червячного колеса такие же, как и у витков резьбы червяка. Резьба червяка может быть однозаходной или многозаходной, а также правой или левой. Наиболее распространена правая резьба с числом заходов z1=1…4.
Различают два основных вида червячных передач: цилиндрические, или просто червячные, передачи (с цилиндрическими червяками) и глобоидные (с глобоидными червяками).
По сравнению с обыкновенными зубчатыми передачами, передаточное отношение (передаточное число) червячного редуктора может быть значительно большим. Так, например, при однозаходном червяке (z1=1) и червячном колесе с z2=100 передаточное число передачи u =100. При одном и том же передаточном числе червячный редуктор гораздо компактнее обыкновенной зубчатой передачи. Возможность осуществления большого передаточного числа при одной ступени передачи, компактность, плавность и бесшумность работы — основные достоинства редукторов с червячной передачей. Благодаря этим достоинствам червячные передачи широко применяют в подъёмно-транспортных машинах, различных станках и некоторых других машинах. Передаточное число червячной передачи принимают обычно в пределах u = 8…90, но в специальных установках оно доходит до u=1000 и более.
В червячной передаче помимо потерь передаваемой мощности, свойственных зубчатой передаче, имеются потери мощности, свойственные винтовой паре. Следовательно, к. п. д. червячного редуктора значительно меньше, что является основным недостатком червячных передач. К недостаткам относятся также склонность витков резьбы червяка и зубьев колеса к заеданию и необходимость применения для венцов червячных колёс дорогих антифрикционных материалов. Из-за этих недостатков червячные редукторы применяют значительно реже зубчатых и только для передачи небольших и средних мощностей, обычно до 50 кВт и реже — до 200 кВт.
Благодаря своей конструкции, мотор-редукторы с червячной передачей характеризуются плавностью и бесшумностью работы. К достоинствам червячного мотор-редуктора также можно отнести компактность — червячный мотор-редуктор будет значительно меньшего размера по сравнению с аналогичным мотор-редуктором с зубчатой передачей с одним и тем же передаточным числом редуктора. Характерной особенностью червячного мотор-редуктора является свойство самоторможения.
Червячные мотор-редукторы имеют развернутое под 90 градусов расположение выходного вала, что бывает удобно в случае, когда нет возможности (например, по габаритам) расположить весь мотор-редуктор с соосным расположением вала.
- Гузенков П. Г. Детали машин: Учеб. для вузов,— 4-е изд. — М.: Высш. шк., 1986 г.
- Иванов А. С. Конструируем машины шаг за шагом, часть вторая. — М.: Издательство МГТУ имени Н. Э. Баумана, 2003 г.
Планетарная передача — Википедия
 Планетарная передача с остановленным водилом по сути является двухступенчатой зубчатой передачей с неподвижными осями колес.
Планетарная передача с остановленным водилом по сути является двухступенчатой зубчатой передачей с неподвижными осями колес.  Планетарная передача (солнечная шестерня остановлена)
Планетарная передача (солнечная шестерня остановлена)  Планетарная передача (коронная шестерня остановлена)
Схема эпициклически движущейся планеты
Планетарная передача (коронная шестерня остановлена)
Схема эпициклически движущейся планетыПланетарная передача (далее — ПП) — механическая передача вращательного движения, за счёт своей конструкции способная в пределах одной геометрической оси вращения изменять, складывать и раскладывать подводимые угловые скорости и/или крутящий момент. Обычно является элементом трансмиссии различных технологических и транспортных машин.
Конструктивно ПП всегда представляет собой набор взаимозацепленных зубчатых колёс (не менее 4), часть из которых (не менее 2) имеет общую геометрическую неподвижную ось вращения, а другая часть (также, не менее 2) имеет подвижные оси вращения, концентрически вращающиеся на так называемом «водиле» вокруг неподвижной. Зубчатые колёса на неподвижной оси всегда связаны друг с другом не напрямую, а через зубчатые колёса на подвижных осях, а ввиду того, что вторые способны не только вращаться относительно первых, но и обкатывать их, тем самым передавая поступательное движение на водило, все звенья ПП, на которые можно подавать/снимать мощность, получают возможность вращаться дифференциально, с тем лишь условием, что угловая скорость любого такого звена не абсолютно хаотична, а определяется угловыми скоростями всех остальных звеньев. В этом плане ПП похожа на планетарную систему, в которой скорость каждой планеты определяется скоростями всех остальных планет системы. Дифференциальный принцип вращения всей системы, а также то, что в своём каноническом виде набор зубчатых колёс, составляющих ПП, собран в некоем подобии солнца и эпициклически движущихся по орбите планет, даёт данной механической передаче такие присущие только ей интернациональные определения, как планетарная, дифференциальная (от лат. differentia — разность, различие) или эпициклическая, каждое из которых в данном случае есть синонимы.
С точки зрения теоретической механики планетарная передача — это механическая система с двумя и более степенями свободы. Эта особенность, являющаяся прямым следствием конструкции, есть важное отличие ПП от каких-либо других передач вращательного движения, всегда имеющих только одну степень свободы. И эта особенность наделяет саму ПП тем важным качеством, что в аспекте воздействия на угловые скорости вращения ПП может не только редуцировать эти скорости, но и складывать и раскладывать их, что, в свою очередь, делает её основным механическим исполнительным узлом не только различных планетарных редукторов, но таких устройств, как дифференциалы и суммирующие ПП.
Планетарная передача и планетарный механизм[править | править код]
В русскоязычной инженерной терминологии термины планетарная передача (далее — ПП) и планетарный механизм (далее — ПМ) зачастую предполагаются как синонимы. Отличия в том, что термин ПП обычно используется в контексте принципиального понимания устройства той или иной передачи вращательного движения, особенно если устройство такой передачи не очевидно (скрыто корпусом/картером) или такая передача обладает определёнными уникальными свойствами, присущими только планетарной, и на этом надо акцентировать внимание. А термин ПМ используется для обозначения конкретного зубчато-рычажного механизма, причём существуют критерии, позволяющие чётко описать ПМ как сборочный узел в составе более крупного узла или агрегата и определить, сколько и каких именно использовано ПМ в конкретной передаче вращательного движения.
Состав планетарного механизма[править | править код]
Конструкция ПП/ПМ основана на различных комбинациях из трёх основных и нескольких одинаковых вспомогательных звеньев. Три основные звена с одной общей осью вращения — два центральных зубчатых колеса и водило. Вспомогательные звенья — набор одинаковых зубчатых колёс на подвижных осях вращения и подшипники.
- Малое центральное зубчатое колесо с внешними зубьями называется солнечной шестернёй или солнцем (С).
- Большое центральное зубчатое колесо с внутренними зубьями называется коронной, эпициклической шестернёй или эпициклом (Э).
- Водило (В) является основой ПМ — это неотъемлемая деталь абсолютно любого ПМ и краеугольный камень всей идеи передачи вращения через планетарную систему с дифференциальной связью. Водило представляет собой рычажный механизм — обычно такую пространственную вилку, ось «основания» которой совпадает с осью самого ПМ, а оси «зубцов» с установленными на них сателлитами концентрически вращаются вокруг неё в плоскости/плоскостях расположения центральных зубчатых колёс. Оси «зубцов» — это и есть так называемые подвижные оси или оси сателлитов
- Сателлиты () представляют собой зубчатые колёса (или группы колёс) с внешними зубьями. При этом сателлиты находятся в одновременном и постоянном зацеплении с обоими центральными зубчатыми колёсами ПМ. Количество сателлитов в ПМ обычно составляет от двух до шести (чаще всего — три, так как только при трёх сателлитах нет нужды в специальных уравновешивающих механизмах) и точного значения для функциональности ПМ не имеет. В различных ПМ применяются сателлиты одновенцовые (одно простое зубчатое колесо), двухвенцовые (два соосных зубчатых колеса с общей ступицей), трёхвенцовые и так далее. Также сателлиты могут быть парными — то есть, располагающимимся на осях одного водила и зацепленными в паре.
Зубчатые колёса, составляющие ПМ, могут быть любого известного типа: прямозубые, косозубые, шевронные, червячные. Тип зацепления в общем случае не важен и на принципиальную работу ПП влияния не оказывает.
В любом ПМ оси вращения центральных зубчатых колёс и водила всегда совпадают. Однако это не значит, что оси сателлитов всегда будут параллельны основной оси. Как и в случае с простыми зубчатыми передачами, здесь возможны варианты параллельных, скрещивающихся и пересекающихся осей. Пример второго варианта — межколёсный дифференциал с коническими зубчатыми колёсами. Пример третьего варианта — самоблокирующийся дифференциал Torsen с червячным зацеплением.
Любой ПМ, независимо простой он или сложный, плоский или пространственный, для своей работоспособности должен иметь одно водило с сателлитами и не менее двух любых центральных зубчатых колёс. Под определением «два любые» подразумевается, что это могут быть не только одно солнце и один эпицикл, но и два солнца и ни одного эпицикла, или два эпицикла и ни одного солнца. Три звена, в том числе водило, есть необходимое и достаточное условие для того, чтобы ПМ мог выполнять функции передачи мощности и сложения/разложения потоков: работать в качестве редуктора (в том числе многоскоростного), в качестве дифференциала или суммирующей ПП. Также три звена есть основа такого русскоязычного технического термина, как Трёхзвенный Дифференциальный Механизм (или ТДМ).
Формально, механизмы, состоящие всего из двух звеньев — из водила и всего лишь одного центрального зубчатого колеса — также могут именоваться планетарными. Фактически же, такие двухзвенные ПМ трудно разумно приспособить для выполнения какой-либо работы: они не годятся для передачи мощности с одного основного звена на другое и лишь при определённых условиях могут работать как переусложнённая прямая передача. Увеличение числа основных звеньев одного ПМ в большую сторону — до 4 и более — возможно и формально и фактически, однако при этом такие ПМ не приобретают никаких новых свойств, хотя и получают больше теоретически доступных передаточных отношений и могут давать проектируемой ПП определённые компоновочные преимущества.
Простые и сложные ПМ, планетарный ряд[править | править код]
Схемы наиболее распространённых сложных планетарных механизмовКритерием деления ПМ на простые и сложные является число составляющих его основных звеньев (именно основных, а число сателлитов — не в счёт). Простой ПМ имеет всего три основных звена: одно водило и два любых центральных зубчатых колеса. Кинематика допускает всего-лишь 7 (семь!) ПМ, подпадающих под это условие: один наиболее распространённый и всем известный, так называемый «элементарный», с набором одновенцовых сателлитов схемы ; три ПМ с двухвенцовыми саттелитами (, , ) и три ПМ с парными взаимозацепленными сателлитами (СВЭ, СВС, ЭВЭ)).
Сложных ПМ гораздо больше чем простых. Их точное число не определено ввиду отсутствия такой нужды, а наиболее распространённые из них приведены на рисунке. Точно так же как и простые ПМ, сложные имеют всего одно водило, но центральных зубчатых колёс может быть три и более. При этом в составе сложного ПМ всегда умозрительно можно выделить несколько простых ПМ (конкретно: три в четырёхзвенном и шесть в пятизвенном), каждый из которых в себя включает два каких-то центральных зубчатых колеса и одно общее водило.
Каждый набор из центральных зубчатых колёс и сателлитов, вращающихся в одной плоскости, образует так называемый планетарный ряд. Простой ПМ с набором одновенцовых сателлитов является однорядным. Все три простые ПМ с двухвенцовыми сателлитами — двухрядные. ПМ с парными взаимозацепленными сателлитами схемы СВЭ — однорядный; схем СВС и ЭВЭ — двухрядные. Таким образом, все простые ПМ могут быть или однорядными или двухрядными. Сложные ПМ, в свою очередь, могут быть двух, трёх и четырёхрядные. Верхнее число рядов в сложном ПМ формально не ограничено, хотя фактически уже пятирядные есть большая редкость, хотя в сборках из планетарных механизмов, применяющихся в многоступенчатых планетарных коробках передач, общее число рядов может быть пять и больше. Нередко термины ПМ и планетарный ряд предполагаются как синонимы, но, в общем случае, это неверно: даже если в отдельных случаях оба термина могут обозначать одно и то же, всегда следует помнить, что их смыл несколько разный.
Плоские и пространственные ПМ[править | править код]
Свободный дифференциал на основе простого плоского двухрядного ПМ с парными сателлитами Свободный дифференциал на основе пространственного ПМ с коническими шестернямиНаличие в составе одного ПМ более одного планетарного ряда не означает, что он является пространственным. Сколько бы ни было рядов, но если плоскости вращения всех составляющих каждый ряд зубчатых колёс параллельны, то такой ПМ будет оставаться плоским. Критерием отличия плоского ПМ от пространственного является наличие не просто более одной плоскости вращения составляющих его зубчатых колёс, но наличие непараллельных плоскостей их вращения. Плоскости вращения звеньев в пространственном ПМ не обязаны быть строго перпендикулярны друг-другу и могут находиться под любыми произвольными углами. Примером пространственного ПМ может служить конический симметричный дифференциал, наподобие применяющегося в приводе ведущих колёс автомобиля. А вот близкий по конструкции цилиндрический дифференциал, применяющийся там же и выполняющий точно такие же функции, будет оставаться плоским ПМ.
Пространственные ПМ по своему функционалу ничем не отличаются от аналогичных по составу плоских ПМ. Выбор того или иного ПМ в качестве основы конкретной ПП есть лишь вопрос экономики или конструкторских предпочтений. Тот же простой межколёсный дифференциал почти всегда выполнен на основе пространственного ПМ не потому, что что плоский не годится, а, скорее, по определённым компоновочным соображениям. Плюс, как это ни странно, пространственный ПМ для выполнения схожих функций может требовать меньшего количества шестерён и деталей вообще. Так, тот же межколёсный дифференциал в пространственном варианте требует всего лишь 4 одинаковые шестерни, из которых две пойдут на два солнца и две — на два саттелита. В случае же плоского варианта, таких шестерён потребуется как минимум шесть, а скорее всего — восемь, и при этом они обязательно будут двух разных типоразмеров.
2 степени свободы ПМ[править | править код]
Уникальной особенностью любого ПМ, отличающей его от всех прочих зубчатых передач, является наличие у него двух степеней свободы. Применительно к простому трёхзвенному ПМ это означает, что понимание угловой скорости вращения любого одного основного звена не даёт однозначного понимания угловых скоростей двух других основных звеньев, даже если известны все передаточные отношения внутри ПМ. Здесь все три основных звена находятся в дифференциальной связи друг с другом и для определения их угловых скоростей надо знать угловые скорости как минимум двух из них. В этом есть важное отличие ПМ от прочих зубчатых механизмов, в которых угловые скорости всех элементов связаны линейной зависимостью, а по угловой скорости одного элемента всегда можно точно определить угловые скорости всех остальных элементов, сколь много их бы не было. И в этом есть основа уникальных свойств, присущих любому ПМ: способность изменять угловые скорости на выходе при неизменных угловых скоростях на входе, способность делить и суммировать потоки мощности и всё это при постоянно зацепленных шестернях.
Любой ПМ, независимо от того, простой он или сложный, имеет фактически лишь две степени свободы. Для простого ПМ это подтверждается и визуальным наблюдением за работой такого механизма и уравнением Чёбышева. Для сложных ПМ это визуально не очевидно, а уравнение Чёбышева теоретически может допускать существование для таких ПМ трёх степеней свобод, что подразумевает наличие четырёх звеньев, находящихся в дифференциальной связи друг с другом. Но фактически такие сложные ПМ будут физически неработоспособны в тех практических задачах, ради которых они создаются, а все работоспособные сложные ПМ останутся двухстепенными. Независимо от числа основных звеньев любого работоспособного сложного ПМ, в нём, так же как и в простом ПМ, в дифференциальной связи друг с другом будет находиться только три основных звена, а остальные основные звенья, сколько бы их ни было, будут иметь линейную связь с каким-то одним из трёх вышеупомянутых. Попытки же создания сложных ПМ с тремя (и тем более, с четырьмя) фактическими степенями свободы считаются бесперспективными, а все работоспособные трёх- и четырёхстепенные ПП основаны на сборке последовательно взаимозацепленных двухстепенных ПМ.
Передаточное отношение[править | править код]
 Планетарная передача в режиме повышения скорости. Водило (зелёное) вращается внешним источником. Усилие снимается с солнечной шестерни (жёлтая), в то время как кольцевая шестерня (красная) закреплена неподвижно. Красные метки показывают вращение входного вала на 45°.
Планетарная передача в режиме повышения скорости. Водило (зелёное) вращается внешним источником. Усилие снимается с солнечной шестерни (жёлтая), в то время как кольцевая шестерня (красная) закреплена неподвижно. Красные метки показывают вращение входного вала на 45°.Передаточное отношение такой передачи визуально определить достаточно сложно, в основном, потому что система может приводиться во вращение различными способами.
При использовании планетарной передачи в качестве редуктора один из трёх её основных элементов фиксируется неподвижно, а два других служат в качестве ведущего и ведомого. Таким образом, передаточное отношение будет зависеть от количества зубьев каждого компонента, а также от того, какой элемент закреплён.
Рассмотрим случай, когда водило зафиксировано, а мощность подводится через солнечную шестерню. В этом случае планетарные шестерни вращаются на месте со скоростью, определяемой отношением числа их зубьев относительно солнечной шестерни. Например, если мы обозначим число зубьев солнечной шестерни как S{\displaystyle S}, а для планетарных шестерён примем это число как P{\displaystyle P}, то передаточное отношение будет определяться формулой SP{\displaystyle {\frac {S}{P}}}, то есть если у солнечной шестерни 24 зуба, а у планетарных по 16, то передаточное отношение будет −2416{\displaystyle -{\frac {24}{16}}}, или −32{\displaystyle -{\frac {3}{2}}}, что означает поворот планетарных шестерён на 1,5 оборота в противоположном направлении относительно солнечной.
Далее вращение планетарных шестерён может передаваться кольцевой шестерне, с соответствующим передаточным числом. Если кольцевая шестерня имеет A{\displaystyle A} зубьев, то оно будет вращаться с соотношением PA{\displaystyle {\frac {P}{A}}} относительно планетарных шестерён. (В данном случае перед дробью нет минуса, так как при внутреннем зацеплении шестерни вращаются в одну сторону). Например, если на кольцевой шестерне 64 зуба, то относительно приведённого выше примера это отношение будет равно 1664{\displaystyle {\frac {16}{64}}}, или 14{\displaystyle {\frac {1}{4}}}. Таким образом, объединив оба примера, мы получим следующее:
- Один оборот солнечной шестерни даёт −SP{\displaystyle -{\frac {S}{P}}} оборотов планетарных шестерён;
- Один оборот планетарной шестерни даёт PA{\displaystyle {\frac {P}{A}}} оборотов кольцевой.
В итоге, если водило заблокировано, общее передаточное отношение системы будет равно −SA{\displaystyle -{\frac {S}{A}}}.
В случае, если закреплена кольцевая шестерня, а мощность подводится к водилу, передаточное отношение на солнечную шестерню будет меньше единицы и составит 1(1+AS){\displaystyle {\frac {1}{(1+{\frac {A}{S}})}}}.
Если закрепить кольцевую шестерню, а мощность подводить к солнечной шестерне, то мощность должна сниматься с водила. В этом случае передаточное отношение будет равно 1+AS{\displaystyle 1+{\frac {A}{S}}}. Это самое большое передаточное число, которое может быть получено в планетарной передаче. Такие передачи используются, например, в тракторах и строительной технике, где требуется большой крутящий момент на колёсах при невысокой скорости.
Всё вышесказанное можно описать следующими двумя уравнениями (выведены из условия отсутствия проскальзывания сопрягаемых шестерён и следовательно равенства дуг, проходимых точками, находящихся на окружностях, в единицу времени):
- A(ωa−ωc)=PωpS(ωs−ωc)=−Pωp{\displaystyle {\begin{aligned}A\left(\omega _{a}-\omega _{c}\right)=P\omega _{p}\\S\left(\omega _{s}-\omega _{c}\right)=-P\omega _{p}\end{aligned}}}
Здесь ωa,ωc,ωp,ωs{\displaystyle \omega _{a},\omega _{c},\omega _{p},\omega _{s}} — угловые скорости соответственно: кольцевой шестерни, водила, планетарных шестерён относительно водила, и солнечной шестерни. Первое уравнение характеризует вращение водила относительно кольцевой шестерни, второе — солнечной шестерни относительно водила.
Если исключить из уравнений ωp{\displaystyle \omega _{p}} путём их сложения — получится одно уравнение: Aωa+Sωs=(A+S)ωc{\displaystyle A\omega _{a}+S\omega _{s}=(A+S)\omega _{c}}. Так как числа зубьев шестерён всегда удовлетворяют условию A=S+2P{\displaystyle A=S+2P} (исходя из простых геометрических соотношений, поскольку в диаметр коронной шестерни помещается диаметр солнечной шестерни и два диаметра сателлитов), по-другому это уравнение можно записать как:
(2+n)ωa+nωs−2(1+n)ωc=0{\displaystyle \left(2+n\right)\omega _{a}+n\omega _{s}-2\left(1+n\right)\omega _{c}=0}
Где n — это параметр передачи, равный n=SP{\displaystyle n={S \over P}}, то есть отношению чисел зубьев солнечной и планетарных шестерён.
В нижеуказанной таблице (указывающей выходные скорости различных типов планетарных передач в зависимости от их конструктивных особенностей) приняты следующие условные обозначения:
Цилиндрический редуктор: виды, схемы, ГОСТ, проектирование
В большинстве механизмов с электрическим двигателем стоит цилиндрический редуктор. Он снижает количество оборотов и повышает мощность агрегата. Зубчатый механизм передачи крутящего момента через цилиндрические колеса имеет наиболее высокий КПД по сравнению с другими способами. Различные виды цилиндрических редукторов широко применяются в металлургическом и машиностроительном оборудовании, электрическом инструменте и автомобилях.

Конструктивные особенности
Основой любого редуктора является зубчатое зацепление, передающее вращательный момент и изменяющее число оборотов вала. Для цилиндрических зацеплений характерна возможность вращаться в обе стороны. При необходимости ведомый вал с колесом подключается к двигателю и становится ведущим. Они в данной конструкции расположены параллельно, горизонтально и вертикально. Устройство цилиндрических редукторов может быть самое разное, но оно обязательно включает в свою конструкцию:
- ведущий;
- ведомый вал;
- шестерню;
- колесо;
- подшипники;
- корпус;
- крышки;
- систему смазки.
В простейшем одноступенчатом редукторе одна пара находится в зацеплении – шестерня и колесо. Если ступеней 2 и больше, соответственно увеличивается количество деталей. Появляются промежуточные оси. Для изменения направления вращения, в кинематическую схему включают паразитку, промежуточную шестерню с количеством зубьев как у ведущей.

Корпус и крышка отливаются из чугуна или делаются сварными из низкоуглеродистого листа толщиной 4 – 10 мм в зависимости от габаритов и мощности узла. Сварными делают маленькие редуктора. Остальные имеют крепкий литой корпус.

Характеристика цилиндрических редукторов
Количество зацеплений, тип зуба и взаимное расположение валов для всех видов оборудования описывает ГОСТ Редукторы цилиндрические. В нем указаны типоразмеры всех деталей, которые могут применяться в цилиндрических редукторах при различных количествах ступеней. Максимальное передаточное число одной пары 6,5. Общее многоступенчатого редуктора может быть до 70.
Больше чем у цилиндрического редуктора может быть передаточное число у червячной передачи,оно может достигать 80. При этом они компактные, но используются редко из-за низкого КПД. У цилиндрических одноступенчатых редукторов КПД 99 – 98%, самый высокий из всех видов передач.Отличаются червячные и цилиндрические редукторы расположением валов. Если у цилиндрических они параллельные, то червяк располагается к колесу под углом. Следовательно валы ведущий и ведомый выходят из перпендикулярно расположенных боковых стенок корпуса.
Цилиндрические редуктора самые шумные, при соприкосновении зубьев происходит удар поверхности одну о другую. Это исключает сильное трение и перегрев.
Для смазки достаточно залить масло в поддон, чтобы нижние шестерни в него частично погрузились. При вращении зубья захватывают масло и разбрызгивают его на другие детали.
Проектирование и порядок расчета
Расчет будущего редуктора начинается с определения передаточного момента и подборки его из нормированных пар. После этого уточняются диаметры деталей и межосевое расстояние валов. Составляется кинематическая схема, определяется оптимальная форма корпуса и крышки, номера подшипников. В сборочный чертеж входит кинематическая схема двухступенчатого редуктора, система смазки и способы ее контроля, типы подшипников и места их установки.
ГОСТ 16531-83 описывает все возможные виды и типоразмеры зубчатых колес, которые могут применяться в цилиндрических редукторах с указанием модуля, количества зубьев и диаметра. По размеру шестерни подбирается вал. Его прочность рассчитывается с учетом вращательного момента на скручивание и изгиб. Определяется минимальный размер, умножается на коэффициент прочности. Затем выбирается ближайший больший нормализованный размер вала. Шпонка рассчитывается только на срез и подбирается аналогично.
Скачать ГОСТ 16531-83
По диаметру вала выбирается подшипник. Его тип определяется направлением зуба. При косозубой передаче ставят упорные, более дорогие. Прямозубая передача не нагружает их в осевом направлении, и однорядные шарикоподшипники работают по несколько тысяч часов.

Схема сборки указывается на чертеже внизу и подробно расписывается в технологической документации, которая выдается в производство вместе с чертежами. На главном чертеже с общим видом в таблице указываются технические характеристики редуктора, которые затем переносятся в паспорт:
- количество ступеней;
- передаточное число;
- число оборотов ведущего вала;
- мощность на выходе;
- КПД;
- габариты;
- вес.
Дополнительно могут указываться вертикальное расположение зацепления, направление вращение вала и способ установки: фланцевый или на лапах.
Виды цилиндрических редукторов
Цилиндрические редукторы разнообразны по конструкции, размерам и мощности, они делятся на виды по нескольким характеристикам:
- тип крепления;
- расположение валов;
- количество ступеней;
- нарезка зуба.
К характеристикам могут относиться виды подшипников и тип соединения валов.

Редукторы цилиндрические одноступенчатые могут крепиться к двигателю и корпусу рабочего узла фланцами. Конструкция компактная, с минимальными затратами материалов.В основном они устанавливаются на подошву с выступами по периметру или на лапки с отверстиями под анкерные болты. Небольшие по габариту узлы могут устанавливаться на сварной каркас. Для габаритных агрегатов делается специальный фундамент.
Расположение валов
Входной и выходной валы могут располагаться горизонтально, вертикально, параллельно друг другу, но в разных плоскостях для многоступенчатых узлов. При наличии только одного зацепления, валы находятся в одной плоскости, строго вертикальной или горизонтальной. Они редко выводятся в одну сторону, только при возможности компактного расположения двигателя и рабочего узла. У двухступенчатого цилиндрического редуктора межосевое расстояние больше и можно монтировать двигатель со стороны исполнительного механизма.
Редукторы цилиндрические могут выпускать с вертикальным расположением валов. Их удобно устанавливать на машины, но верхнее зацепление и подшипники смазываются слабо. Для длительной работы с большими нагрузками они не подходят.
Корпус редуктора цилиндрического горизонтального габаритный, занимает много места. Он меньше греется, выдерживает нагрузки и вибрацию, устойчив.В моделях от 3 и более ступеней, валы располагаются горизонтально. Смазка достает до всех подшипников. В многорядных конструкциях делается дополнительно орошение сверху, с маслопровода, установленного в крышку.
В характеристики редуктора входит и направление вращения выходного вала. По часовой стрелке считается нормальным и в паспорте не указывается.Левое вращение отражается в характеристиках. При проектировании редуктора оно имеет знак «–».
Классификация по количеству зацеплений
Основной технической характеристикой цилиндрических редукторов является их деление по количеству ступеней. Простейшие одноступенчатые модели имеют максимальное передаточное число 6,5, малую мощность, КПД 99%. Они не греются, свободно вращаются в обратную сторону. Их можно использовать как понижающие.
На небольших механизмах с небольшой мощностью удобно устанавливать мотор-редуктор. Это собранные в одном корпусе электродвигатель и одноступенчатый редуктор. На изготовление вспомогательных элементов и площадок для крепления расходуется значительно меньше материала, чем для двух отдельных узлов. Надежная передача вращения от двигателя. Простой способ соединения с рабочим узлом.
У двухступенчатого цилиндрического редуктора указывается кинематическая схема зацепления. Она может быть развернутой, когда на промежуточном валу по бокам установлены 2 колеса. Аналогично ведущий вал передает крутящий момент двумя одинаковыми шестернями. Компоновка с двойным зацеплением характерна для сильно нагруженных моделей с наклонной нарезкой зубьев. КПД двухступенчатых моделей 97 – 98%.
Вертикальные двухступенчатые модели компактные, часто имеют фланцевое соединение. Устанавливаются на рабочий механизм вместе с двигателем.
У редукторов цилиндрических трехступенчатых передаточное число может достигать 70. В технической документации указывается передаточное отношение общее и каждой пары.Расположение валов может быть двурядным. Трехступенчатые редукторы устанавливают в основном на больших станках, ножницах, подъемных механизмах, где требуется большое усилие и маленькая скорость. КПД трехступенчатых редукторов 96%.
Нарезка зуба
Цилиндрические редукторы различают по наклону зуба:
- прямозубые;
- косозубые;
- шевронные.
Шестерня и колесо с прямым зубомотносительно простая в изготовлении. Они быстроходные с высоким КПД, минимально нагружают подшипники. Основной недостаток – высокий уровень шума при работе.Одинаково хорошо работают в прямом и обратном направлении, когда ведущим становится колесо.
Цилиндрические косозубые редукторы имеют зуб, нарезанный с наклоном. Это увеличивает линию контакта и передаваемое усилие. Зубья заходят в зацепление постепенно. Работает он тихо, плавно.
От наклонного расположения зуба возникает дополнительная осевая нагрузка на подшипники. Их приходится устанавливать упорные, более дорогие и часто менять. Чтобы компенсировать осевые нагрузки, колеса ставят попарно с разным направлением наклона.
Косозубые цилиндрические редукторы компактнее прямозубых с аналогичными характеристиками.Одновременно в зацеплении находится большее количество зубьев. От трения детали греются. Кроме смазки в многоступенчатых моделях делают дополнительно систему охлаждения.
Устанавливают редуктора с косозубым зацеплением на механизмы, требующие большого усилия с длительным непрерывным циклом работы.
Зацепление с наклонным зубом хорошо работает в одном направлении. Обратно прокручивается с большим усилием. Изготовление деталей сложное и трудоемкое, требует высокой точности.
Шевронный зуб представляет собой косой, нарезанный в разных направлениях. Обычно нарезка производится фрезами для косозубых колес. По центру обода делается проточка для выхода инструмента. Нарезка производится сначала в одну сторону, затем деталь переставляется, и вторая полоса на ободе нарезается в другую сторону. Зубья сходятся вершинами в центре шестерни.
Шевронное зацепление работает тихо. Осевая нагрузка равномерно распределяется в обе стороны и компенсируется.
Подшипники работают в нормальном режиме. Двойной наклон зуба делает передачу мощной.
В зацеплении одновременно участвует несколько зубьев. Подогнать с высокой точность эвольвенты на обеих взаимодействующих деталях невозможно. Возникает трение и нагрев.
Шевронные колеса изготавливать сложно. Необходима высокая точность фрезеровки и пересечение условных линий в центре обода. Нарезка производится в 2 приема с перестановкой и тонкой регулировкой. В обратном направлении шеврон проворачивается с большим усилием.
Шевронные редуктора используют в агрегатах с большими нагрузками и короткими циклами работы. Их устанавливают на кузнечно-прессовое, подъемное оборудование, на механизмы, где требуется тормоз.
Клети
Многоступенчатые цилиндрические редукторы с несколькими выходными валами, вращающимися синхронно от одного двигателя и ведущего вала, называют клетями. Их устанавливают на агрегаты с несколькими исполнительными механизмами, работу которых необходимо синхронизировать. Они имеют сложную кинематическую схему с передачей крутящего момента от одной шестерни 2 колесам. Для возможности работать параллельно, используют соосные валы, один из которых полый.
Устанавливают клети на прокатных и правильных станах, где одновременно должны синхронно вращаться гибочные и правильные валки.

Коробки скоростей
Разновидность цилиндрического редуктора с подвижным промежуточным валом является широко известной коробкой скоростей. При изменении положения вала одни пары выходят из зацепления, другие начинают взаимодействовать. В результате изменяется передаточное число, скорость вращения на выходе.
Коробки скоростей делаются с прямым зубом. Косозубые встречаются редко, когда большие нагрузки на исполнительный механизм.

Применение цилиндрических редукторов
Назначение редуктора – понижение числа оборотов двигателя и увеличение мощности на выходном валу. Сборка цилиндрического редуктора не представляет сложности. По центру отверстий проходит разъем корпуса и крышки. Подшипники насаживаются на валы, устанавливаются в заготовленные гнезда и подпираются снаружи крышками.
Колеса и шестерни крепятся на валы с помощью шпонок.
Для регулировки межосевого расстояния необходимо с большой точностью делать расточку корпуса.
Техобслуживание редукторов простое. Надо регулярно доливать масло, периодически менять его. Детали, расположенные внутри, рассчитаны на длительную эксплуатацию в течение как минимум 10 лет.
Применяются редуктора в различных отраслях промышленности. Отдельные типы крупного оборудования способны выдержать любые погодные условия. Их устанавливают в карьерах и на открытых площадках, на козловых кранах.
Прокатное и кузнечно-прессовое оборудование не сможет работать без редукторов. В этой отрасли востребовано много разновидностей редукторов. Прямозубые стоят на кранах. Мощные шевронные вращают кривошипные прессы, вальцы, манипуляторы, подающие металл.
Прокатные т-правильные станы работают исключительно благодаря клетям, передающим вращение двигателя на валки и рабочие узлы.
Под каждым капотом прячется коробка скоростей. На каждом станке имеется редуктор или несколько. Маленькие передачи установлены в электроинструменте и регулируют скорость вращения шпинделя дрели, болгарки и фрезера.
Достоинства и недостатки
Цилиндрический передаточный механизм получил широкое применение в различных областях. Он имеет неоспоримые достоинства по сравнению с червячным:
- высокий КПД;
- не греется;
- работает в обе стороны.
Преимущества и недостатки цилиндрического редуктора зависят от особенностей зубчатого зацепления и других конструктивных элементов.
Преимущества
Основным положительным моментом является высокий КПД. Он значительно превосходит мощности на выходе при одинаковых двигателях, все зубчатые и другие виды передач.
Узел может работать длительное время без перерывов, переключаться бесконечное количество раз с одного режима на другой и даже менять направление вращения.
Выделение тепла минимальное. Нет надобности ставить систему охлаждения. Смазка разбрызгивается нижними колесами, смазывает верхние шестерни, подшипники и собирает вниз, в поддон, всю грязь, сколовшиеся частицы металла.Достаточно периодически доливать масло и раз в 3 – 6 месяцев менять его.Частота профилактических мероприятий зависит от режима работы.
Выходной вал установлен в подшипники качения и практически не имеет люфта. Перемещение его достаточно точное, чтобы использовать зубчатый механизм в качестве привода точных приспособлений и приборов. Осевое и радиальное биение сопрягаемых деталей не влияет на работу механизма.
Эффективность работы не зависит от перепадов напряжения. Передаточное число стабильно. Если падает скорость вращения двигателя, пропорционально замедляется вращение ведомого колеса. Мощность остается неизменной.
Недостатки
Положительное качество – отсутствие трения и торможения, в определенных условиях создает проблемы. В грузоподъемных механизмах при установке цилиндрического редуктора надо ставить сильный тормоз, чтобы удержатьтяжелые предметы на весу и предотвратить их самостоятельное опускание. В червячных передачах ведущим может быть только червяк и из-за большого трения возникает эффект самоторможения.
Проблема всех зубчатых зацеплений в отсутствии предохранительного механизма.
При перегрузе или резком включении ремень проскальзывает по шкиву. Зуб может только сломаться, и деталь придется менять. Как дополнительные предохранители используются шпонки. Они рассчитываются на срез без запаса прочности. Заменить срезанную муфтой простую деталь значительно проще.
Стоимость рабочих деталей большая. Технология изготовления длительная и сложная.При этом зуб постепенно стирается, увеличивается зазор между рабочими поверхностями. Изменять межцентровое расстояние, как в реечных и червячных передачах в редукторе нельзя.Приходится периодически заменять шестерни, колеса, подшипники.
Чем больше стирается эвольвента, тем сильнее стучат друг об друга зубья, и шумит редуктор.
Если вы нашли ошибку, пожалуйста, выделите фрагмент текста и нажмите Ctrl+Enter.