Gps wiki: gps — Викисловарь
Usm gps 2 — WiKi
Данный модуль является заменой устаревшему модулю us_gps
Описание
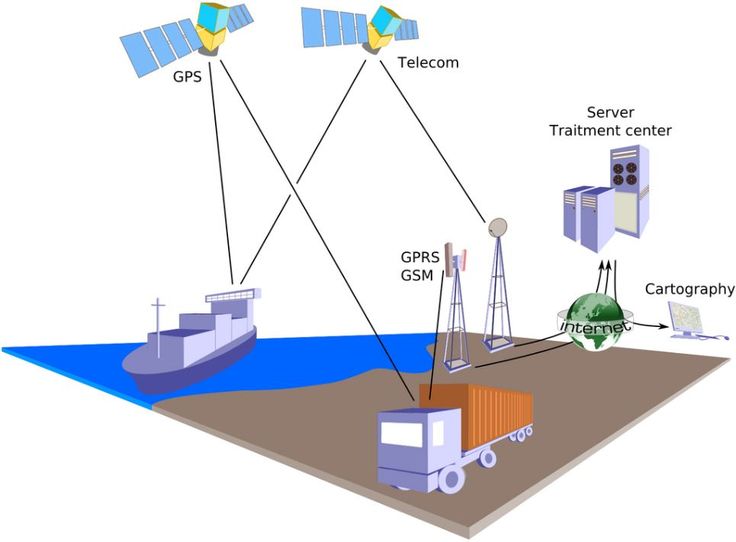
usm_gps_2 — модуль, который может принимать информацию от GPS-трекеров и программ мониторинга с целью фиксирования позиции персонала и автотранспорта. Информация о позиции этих объектов и их маршрутах может помогать в более быстром решении аварийных ситуаций, т.к. эти объекты выводятся на карту покрытия и можно оперативно понимать какого сотрудника, что рядом находится следует отправить на решение проблем.
Вторая версия модуля отличается от первой версии своей внутренней структурой. Теперь для каждого из GPS протоколов запускается свой независимый «слушатель», а в качестве сетевого ядра используется мощный асинхронный суперсервер, способный обрабатывать сотни тысяч TCP-соединений одновременно. Это делает модуль довольно стабильным и надежным.
Соглашение
Мы не позиционируем этот модуль как систему мониторинга транспортом и потому не стоит ожидать от модуля подобный функционал.
Требования
Для работы предрелизной версии (alpha, beta) необходима версия USERSIDE не ниже 3.12.24
Для работы релизной версии (RC, release) необходима версия USERSIDE не ниже 3.13 (еще в разработке)
Поддерживаемые протоколы GPS-трекеров
На данный момент поддерживаются следующие протоколы. Обратите внимание, что список поддерживаемых устройств может быть не полным, так как нам неизвестны все устройства, выпускаемые с поддержкой того или иного протокола. Также важно знать, что вовсе не обязательно модель устройства должна быть похожа на протокол, который фактически прошит в этом устройстве.
OsmAnd
Порт по умолчанию: 5055
Поддерживаемые устройства: Данный протокол используется в основном мобильными приложениями, такими как OsmAnd, SendLocation, Locus Pro Android, Custodium, Traccar и другими.
Так как данный протокол основан на HTTP-запросе с передачей всех данных через параметры этого запроса, то может использоваться в любых приложениях. Для передачи координат достаточно выполнить HTTP запрос: http://module.ip.address:5055/?id={id}&lat={lat}&lon={lon}×tamp={timestamp}&hdop={hdop}&speed={speed}
- {id} — идентификатор устройства (IMEI, серийный номер или любой другой, позволяющий идентифицировать конкретный трекер)
- {lat} — географическая широта в десятичном формате градусов, например, 46.488085
- {lon} — географическая долгота в десятичном формате градусов, например, 30.741091
- {timestamp} — целочисленная метка времени в формате UNIXTIME
- {hdop} — коэффициент снижения точности в горизонтальной плоскости позиционирования (HDOP). Число с плавающей точкой. Параметр можно не передавать.
- {speed} — моментальная скорость в км/ч. Число с плавающей точкой.
GT02A
Порт по умолчанию: 5022
Поддерживаемые устройства: Данный протокол реализован в большом количестве «китайских» устройств, так что точно составить их список невозможно. Однако это один из самых распространенных протоколов, встречающихся в дешевых GPS-трекерах типа noname.
Однако это один из самых распространенных протоколов, встречающихся в дешевых GPS-трекерах типа noname.
Сообщения этого протокола начинаются с заголовочных символов hh или в виде HEX: 0x68 0x68.
GT06
Порт по умолчанию: 5023
Поддерживаемые устройства: GT06, GT06N, GT09, Heacent 908, GT03A, GT03B, GS503, ET100, GT100, GT06D, GK301, JM01, JM08, GT02D, IB-GT102, CRX1, JV200, TP06A, BW08, TR06, JI09, Concox GT300, WeTrack 2
Сообщения этого протокола начинаются с заголовочных символов xx или в виде HEX: 0x78 0x78.
Meiligao
Порт по умолчанию: 5009
Поддерживаемые устройства: GT30i, GT60, VT300, VT310, VT400, GT30, GT30X, PST-AVL01, PT03, PT60, PT300X, PT30, GT-110P, GT-110K, GT-110M, GT-110ES, GT-110ZS, AVL-011, VT900, P008, GT 30, CT01, CT03, CT04, CT04-R, CT04-X, OCT600, MT01, MT02, PT01, PT03, VT1000, GSY007, T200, iStartek, VT310N
Сообщения этого протокола начинаются с заголовочных символов $$ или в виде HEX: 0x24 0x24.
Autofon v4
Порт по умолчанию: 5079
Поддерживаемые устройства: AutoFon 4.4, AutoFon 4.5
Autofon v5
Порт по умолчанию: 5077
Поддерживаемые устройства: AutoFon SE, AutoFon SE+, AutoFon D, AutoFon D-Moto, AutoFon Dialog Mayak, AutoFon S, AutoFon GL Mayak
Autofon v7
Порт по умолчанию: 5099
Поддерживаемые устройства: AutoFon Alpha, AutoFon Alpha XL, AutoFon Alpha 2XL
Autofon v9 (Микро-маяк)
Порт по умолчанию: 9109
Поддерживаемые устройства: АвтоФон Микро-Маяк, АвтоФон Микро-Маяк+
Начиная с версии модуля 2.3
Wialon
Порт по умолчанию: 5039
Поддерживаемые устройства: Wialon IPS, MasterKit, MasterKit BM8009, NeoTech TR1000, а также по данному протоколу передает навигационную информацию сервис uonline.com.ua (если у вас есть трекеры, подключенные к этому сервису, то он может выступать в роли прокси-сервера, передавая информацию в модуль usm_gps_2).
Сообщения этого протокола начинаются с заголовочного символа # или в виде HEX: 0x23.
Важно! Мобильное приложение GpsTag от компании Gurtam (разработчика протокола Wialon) не поддерживается (разработчики Gurtam специально изменили протокол, чтобы бесплатное приложение было возможно использовать только на серверах Gurtam).
OKO-NAVI
Порт по умолчанию: 5098
Поддерживаемые устройства: Все устройства компании OKO
Сообщения этого протокола заключены в фигурные скобки {...} или в виде HEX: 0x7b ... 0x7d.
MikroTik
Порт по умолчанию: 5200
Поддерживаемые устройства: Все, оснащенные модулем GSP, например, LtAP mini Протокол основан на передаче в теле запроса HTTP-POST данных в виде JSON:
{
"tracker_id": "12345678",
"lat": "N 12 34' 5.678",
"lon": "E 87 65' 4.321",
"speed": "1.234567 km/h",
"heading": "128.039993 deg. True",
"hdop": 122
}
Поэтому может использоваться не только для MikroTik.
Модуль рассчитан на прием координат в формате DMS — этот режим включен в MikroTik по умолчанию. Если вы изменяли формат координат ранее, то нужно переключиться на использование именно этого формата командой:
/system gps set coordinate-format=dms
Простейший скрипт, который следует добавить в планировщик MikroTik, предварительно изменив значения первых трех переменных:
{
:local trackerID "12345678"
:local url "http://usm_gps-url-here/"
:local port 5200
:local lat
:local lon
:local spd
:local heading
:local hdop
/system gps monitor once do={
:set $lat $("latitude")
:set $lon $("longitude")
:set $spd $("speed")
:set $heading $("true-bearing")
:set $hdop $("horizontal-dilution")
}
/tool fetch mode=http url=$url port=$port http-method=post http-header-field="Content-Type: application/json" \
http-data=("{\"tracker_id\": \"".$trackerID."\",\"lat\": \"".$lat."\",\"lon\": \"".$lon."\",\"speed\": \"".$spd."\",\"heading\": \"".$heading."\",\"hdop\":
\"". $hdop."\"}")
}
$hdop."\"}")
}
 $hdop."\"}")
}
$hdop."\"}")
}
Переменная trackerID содержит уникальный в пределах USERSIDE идентификатор данного Микротика. Придумайте его сами. В классических GPS-трекерах идентификатор вшит в каждый трекер и представляет собой обычно целиком или частично IMEI или серийный номер трекера. Но так как в Микротике нет никаких подобных идентификаторов, вы должны реализовать его самостоятельно. Он может быть любой символьной строкой, не обязательно состоящей из цифр.
Также Вы можете доработать этот скрипт, чтобы, например, идентификатором был МАС-адрес первого интерфейса (чтобы не вводить вручную, если так проще), а также можно доработать скрипт, чтобы он хранил предыдущее состояние в глобальных переменных и передавать на сервер информацию только в случае, если новые значения отличаются от предыдущих — это сэкономит трафик, а также избавит от «клякс» на местах стоянки, когда скорость 0 км/ч.
H02
Порт по умолчанию:
Поддерживаемые устройства: H02, H-02A, H-02B, TX-2, H-06, H08, GTLT3, TK110, TK102B-MT61, NT201, NT202, S31, LK109, LK106, LK208, LK206, LK310, LK206A, LK206B, MI-G6, CC830, CCTR, CCTR-630, AT-18, GRTQ, LK210, TR-02
Поддерживается как текстовый, так и бинарный протоколы (начиная с версии модуля 2. 3).
3).
Сообщения текстового протокола начинаются с заголовочных символов *HQ или в виде HEX: 0x2A 0x48 0x51.
Сообщения бинарного протокола начинаются с заголовочного символа $ или в виде HEX: 0x24.
GPS103 (GPS102, Coban)
Порт по умолчанию: 5001
Поддерживаемые устройства: TK103-B, TK103-2B, TK104, TK106, GPS-103, GPS-103-A, TW-MD1101, GPS102B, GPS104, TK110
Сообщения этого протокола начинаются с заголовочных символов ## или в виде HEX: 0x68 0x68
TK103
Порт по умолчанию: 5002
Поддерживаемые устройства: EC-546, TT0024, T1024, T1080, T2024, T2124, T12, T4400, T8800, T15400, TK05, TK10, TK15, TK20, TK110, T18, T18H, T16, GPS105, P168
Сообщения этого протокола заключены в круглые скобки (...) или в виде HEX: 0x28 ... 0x29.
Teltonika
Порт по умолчанию: 5027
Поддерживаются различные устройства, использующие кодеки: 8, 8 Extended
Сообщения этого протокола начинаются с HEX: 0x00.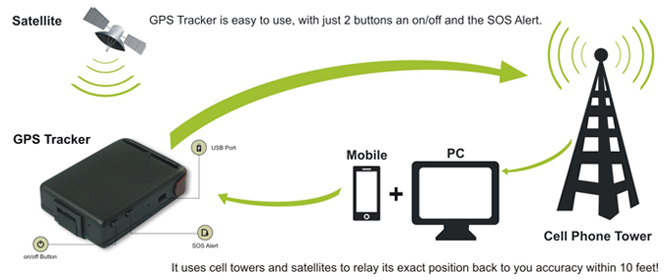
Порт по умолчанию: 9000
Поддерживаемые устройства: все устройства компании Navtelecom
Сообщения этого протокола начинаются с заголовочных символов @NTC или в виде HEX: 0x40 0x4e 0x54 0x43.
ТЕСТ
Порт по умолчанию: 9999
Протокол необходим для съема сэмплов с неизвестного трекера с целью передачи их в запросе на разработку нового протокола либо для определения фактического протокола устройства, основываясь на заголовочных (и хвостовых) символах.
Настройте свой трекер на порт 9999 и наблюдайте за логом. В нем будут появляться строки с отметкой RX-SAMPLE: — это и есть те данные в hex виде, которые присылает ваш трекер. Попробуйте среди описанных выше протоколов найти подходящий по 2..3 заголовочным символам (в формате hex). Если не удалось найти, напишите нам. Возможно протокол для вашего трекера еще не реализован в Userside.
Установка модуля
Загрузка
Загрузите модуль из личного кабинета со страницы загрузок: https://my. userside.eu/customer/downloads.
userside.eu/customer/downloads.
Разархивируйте содержимое архива, например, в каталог /opt/userside. В конечном итоге в каталоге /opt/userside будет образован каталог usm_gps, содержащий файлы модуля. В дальнейших инструкциях будет использоваться именно каталог /opt/userside/usm_gps. Если Вы расположили файлы в другом месте — учитывайте это при выполнении дальнейших инструкций.
Остановка и удаление старой версии
Если вы использовали до этого старую (первую) версию модуля, то остановите его и удалите все записи из crontab для запуска модуля.
Установка Python3 и зависимостей
Для работы модуля необходим Python3 с версией не ниже 3.6. Желательно иметь последнюю версию. Также рекомендуется использовать пакет venv для создания виртуального окружения Python и всех зависимостей, необходимых модулю, чтобы не засорять операционную систему.
Если у вас по какой-то причине более старая версия, то установите последнюю версию. Также установите менеджер пакетов pip3 и пакет venv для реализации виртуального окружения:
Также установите менеджер пакетов pip3 и пакет venv для реализации виртуального окружения:
sudo apt install -y python3 python3-dev python3-venv python3-pip
Для контролируемой работы модуля рекомендуется использовать supervisord. Если вы его еще не установили (он необходим для USERSIDE 3.17 и новее), то установите:
sudo apt install -y supervisor
Перейдите в каталог с модулем и создайте там виртуальное окружение:
cd /opt/userside/usm_gps sudo python3 -m venv venv sudo ./venv/bin/pip install --upgrade pip setuptools
Теперь установите зависимости для модуля:
sudo ./venv/bin/pip install --upgrade -r requirements.txt
Теперь произведите настройку и первый пробный запуск модуля не в фоне. Подробней о запуске модуля ниже в разделе Первый запуск и отладка.
Настройка
Если это первая установка модуля usm_gps_2, то вам необходимо скопировать файл с примером конфигурации settings.ini-example под новым именем settings.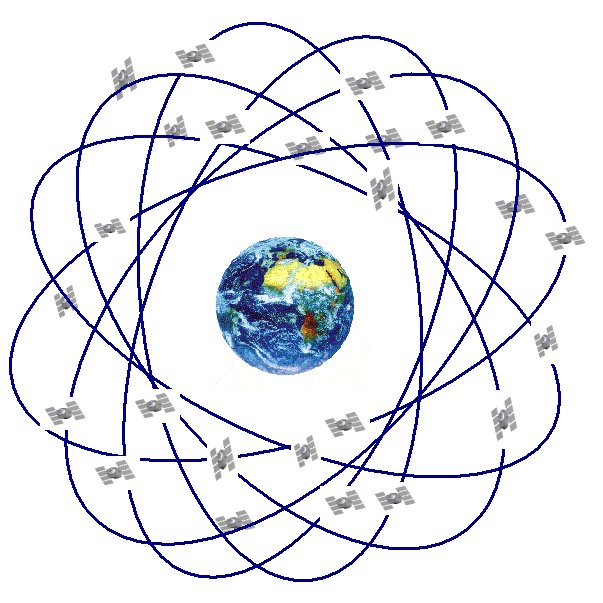 ini:
ini:
cp settings.ini-example settings.ini
Если же вы обновляете модуль usm_gps, то проверьте файл settings.ini-example на наличие новых параметров и добавьте их в свой settings.ini с нужными значениями.
Блок api
Данный блок содержит настройки подключения к ядру USERSIDE по средством API. Вам необходимо указать url вашего USERSIDE (без /oper/), а также key, который вы указали в конфигурационном файле (см.: UserSide API Key). Если ваш USERSIDE использует https соединение с самоподписанным сертификатом, то установите опцию ssl_verify в значение no.
Опция trackers_auth_required определяет необходимость аутентификации трекеров на сервере. Если она установлена в yes, то трекерам с серийными номерами (или IMEI), отсутствующими в USERSIDE, будет отказано в авторизации и данные с них не будут попадать в базу. Это рекомендуемый режим, необходимый для отсеивания трекеров, не зарегистрированных в системе. Если вам такое поведение не подходит, можете отключить аутентификацию трекеров, установив данную опцию в no.
Блок processing
В данном блоке находятся настройки обработчика позиций. Обработчик содержит три фильтра, которые помогут исключить предположительно неверные данные. Эти фильтры должны настраиваться индивидуально. Также следует понимать, что фильтры игнорируют некоторые географические позиции на основании их анализа, что при некорректной настройке может привести к потере нормальных данных. Будьте осторожны при подборе параметров.
Опция hdop_threshold определяет пороговое значения для значения фактора потери горизонтальной точности позиционирования (HDOP). По умолчанию предустановленное значение = 10. Все полученные от трекера навигационные данные со значением HDOP выше порогового будут отброшены и не будут передаваться в USERSIDE. Вы можете настроить это пороговое значение на свое усмотрение, либо отключить, установив его значение в 100. Следующие значения HDOP принято считать стандартными: <1 — Идеально, 1..2 — Отлично, 2..5 — Хорошо, 5..10 — Посредственно, 10. .20 — Плохо, >20 — Очень плохо. Чтобы в базу данных попадали только точки с нормальной точностью, установите пороговое значение в 5. При этом следует понимать, что если координаты были определены с погрешностью, превышающей указанный фактор потери точности, то эти координаты будут отброшены (в лог-файл попадет соответствующая запись об этом). Если протоколом GPS-трекера не предусмотрено вычисление и передача значения фактора потери точности в сторону сервера, то это значение принимается за 0.
.20 — Плохо, >20 — Очень плохо. Чтобы в базу данных попадали только точки с нормальной точностью, установите пороговое значение в 5. При этом следует понимать, что если координаты были определены с погрешностью, превышающей указанный фактор потери точности, то эти координаты будут отброшены (в лог-файл попадет соответствующая запись об этом). Если протоколом GPS-трекера не предусмотрено вычисление и передача значения фактора потери точности в сторону сервера, то это значение принимается за 0.
Фильтр Парковки (дрифт GPS)
Данный фильтр предназначен для определения и отсеивания дрифта GPS во время парковки. Когда транспортное средство стоит на месте и при этом GPS-трекер работает и передает позицию на сервер, на карте можно увидеть следующее:
GPS приемники имеют среднюю погрешность определения позиции около 6 метров. При каждой попытке GPS-приемника определить свою позицию, она будет определена с точностью около 6 метров, не зависимо от предыдущей позиции (GPS-приемники не хранят состояние). Причиной такого поведения может быть неуверенный прием сигналов со спутника, интерференция (автомобиль находится в районе плотной многоэтажной застройки), либо же частичная видимость всей доступной группировки спутников. Например, если антенна расположена внутри автомобиля, то она «видит» только часть неба. Это вполне нормальная штатная ситуация для гражданского GPS. Чтобы детектировать стоянку и отбросить такие позиции, используется фильтр парковки. Включить его можно параметром parked_filter_enable = yes. Этот фильтр начинает работать в том случае, если предыдущая и текущая позиции имели значение скорости, не выше «близкой к нулевой» — она настраивается в параметре parked_speed_threshold, а также если расстояние между предыдущей и текущей позицией не более «отклонения позиции» — оно настраивается в параметре parked_position_deviation (в среднем это 6 метров). Как только автомобиль начнет движение (переместится на расстояние, большее чем «отклонение позиции», либо же разовьет скорость, большую чем «близкую к нулевой», фильтр перестанет действовать и все позиции будут переданы на сервер.
Причиной такого поведения может быть неуверенный прием сигналов со спутника, интерференция (автомобиль находится в районе плотной многоэтажной застройки), либо же частичная видимость всей доступной группировки спутников. Например, если антенна расположена внутри автомобиля, то она «видит» только часть неба. Это вполне нормальная штатная ситуация для гражданского GPS. Чтобы детектировать стоянку и отбросить такие позиции, используется фильтр парковки. Включить его можно параметром parked_filter_enable = yes. Этот фильтр начинает работать в том случае, если предыдущая и текущая позиции имели значение скорости, не выше «близкой к нулевой» — она настраивается в параметре parked_speed_threshold, а также если расстояние между предыдущей и текущей позицией не более «отклонения позиции» — оно настраивается в параметре parked_position_deviation (в среднем это 6 метров). Как только автомобиль начнет движение (переместится на расстояние, большее чем «отклонение позиции», либо же разовьет скорость, большую чем «близкую к нулевой», фильтр перестанет действовать и все позиции будут переданы на сервер. Чтобы примерно определить «отклонение позиции», просто измерьте линейкой на карте длину средней по величине полоски. Уменьшайте и увеличивайте это значение для достижения наилучшего эффекта. Помните, что слишком большие значения могут также отсеивать и нужные позиции.
Чтобы примерно определить «отклонение позиции», просто измерьте линейкой на карте длину средней по величине полоски. Уменьшайте и увеличивайте это значение для достижения наилучшего эффекта. Помните, что слишком большие значения могут также отсеивать и нужные позиции.
Чтобы улучшить качество определения географических координат, используйте современные GNSS-приёмники, способные работать минимум с двумя GNSS системами одновременно (GPS, Galileo, Glonass) и внешние антенны, закрепленные таким образом, чтобы небо не перекрывалось кузовом автомобиля даже частично.
Фильтр Вылетов
Данный фильтр предназначен для определения и отсеивания ошибочных вылетов трека. На карте это может выглядеть вот так:
Такое иногда бывает из-за некачественного приема, интерференции или просто некачественного приемника. Выглядит как точка, отстоящая от трека на таком расстоянии, куда транспортное средство не могло попасть никаким образом. Фильтр вылетов сравнивает фактическое расстояние между предыдущей точкой и текущей и определяет, могло ли это расстояние быть достигнуто при движении транспортного средства с максимальной скоростью этих двух точек.![]() Чтобы включить фильтр вылетов, используйте параметр range_filter_enable = yes. Этот фильтр также имеет несколько настроек. Первая настройка range_delta_time — это максимальное время в секундах между точками, для которых будет работать фильтр. Нет смысла использовать фильтр, если между точками прошло слишком много времени, так как транспортное средство между двумя точками могло двигаться быстрее, чем зафиксировано в этих точках, и действие фильтра уже может быть неточным или вообще ошибочным. Вторая настройка range_distance_factor — коэффициент длины предполагаемого пути, с которым сравнивается фактически пройденное расстояние. Этот коэффициент позволяет немного «удлинить» расчетное значение пути, чтобы исключить погрешность, возникающую на границах вычислений. По умолчанию используется коэффициент 1.1 и максимальное время между точками 60 секунд, однако при включении фильтра вы сами должны более корректно настроить его.
Чтобы включить фильтр вылетов, используйте параметр range_filter_enable = yes. Этот фильтр также имеет несколько настроек. Первая настройка range_delta_time — это максимальное время в секундах между точками, для которых будет работать фильтр. Нет смысла использовать фильтр, если между точками прошло слишком много времени, так как транспортное средство между двумя точками могло двигаться быстрее, чем зафиксировано в этих точках, и действие фильтра уже может быть неточным или вообще ошибочным. Вторая настройка range_distance_factor — коэффициент длины предполагаемого пути, с которым сравнивается фактически пройденное расстояние. Этот коэффициент позволяет немного «удлинить» расчетное значение пути, чтобы исключить погрешность, возникающую на границах вычислений. По умолчанию используется коэффициент 1.1 и максимальное время между точками 60 секунд, однако при включении фильтра вы сами должны более корректно настроить его.
И помните — фильтр отсеивает географическое позиции, ничего не зная при этом о будущих позициях! Будьте аккуратны при использовании. Если у вас появились проблемы с определением координат в Userside, выполняя диагностику отключите этот фильтр в первую очередь.
Если у вас появились проблемы с определением координат в Userside, выполняя диагностику отключите этот фильтр в первую очередь.
Блок log
В данном блоке находятся настройки журналирования событий.
Опция path определяет путь к каталогу, в котором будет размещаться файл журнала модуля. Опция level определяет уровень журналирования от самого детального (для отладки) 1 до «критического» 5. Однако не рекомендуется в данном модуле использовать уровень журналирования выше 3 и лучше остановиться на выбранном по умолчанию уровне 2.
Опция to_console определяет назначение вывода событий журнала. Если опция включена (установлена в yes), то все журнальные записи будут выведены в консоль. Это может быть удобно при отладке модуля, а также является стандартным поведением для работы модуля в контейнере Docker. По умолчанию используется no.
Блок port
В данном блоке перечислены номера TCP портов, на которых находятся слушатели протоколов. Вы можете переопределить номера портов на свое усмотрение, однако следует помнить, что два разных протокола не могут занимать один и тот же порт.
Вы можете переопределить номера портов на свое усмотрение, однако следует помнить, что два разных протокола не могут занимать один и тот же порт.
Также можно закомментировать неиспользуемые порты при помощи символов # или ; чтобы отключить работу протоколов. Например, если все ваши трекеры взаимодействуют по одному и тому же протоколу.
Первый запуск и отладка
Если вы первый раз запускаете модуль usm_gps_2, а также если возникли проблемы в работе, то выполните следующие действия.
- В файле settings.ini в блоке log установите следующие значения:
[log] level = 1 to_console = yes
- А также в блоке ports раскомментируйте необходимый вам протокол(ы).
- Запустите модуль вручную:
/opt/userside/usm_gps/venv/bin/python3 usm_gps.py
- Вы должны увидеть в консоли примерно следующее:
2018-04-25 12:37:16,604 | INFO | *** Module usm_gps version 2.4.0 is starting... 2018-04-25 12:37:16,801 | INFO | GT02A protocol listener started at port 8822 2018-04-25 12:37:16,802 | INFO | GT06 protocol listener started at port 8833 2018-04-25 12:37:16,802 | INFO | MEILIGAO protocol listener started at port 8844 2018-04-25 12:37:16,803 | INFO | AUTOFON4 protocol listener started at port 8854 2018-04-25 12:37:16,804 | INFO | AUTOFON5 protocol listener started at port 8855 2018-04-25 12:37:16,804 | INFO | AUTOFON7 protocol listener started at port 8856 2018-04-25 12:37:16,805 | INFO | WIALON protocol listener started at port 8866 2018-04-25 12:37:16,806 | INFO | OSMAND (Traccar) protocol listener started at port 5055 2018-04-25 12:37:16,807 | INFO | *** Module usm_gps was started and ready to receive connections.
 PID=13878
PID=13878
- Подождите, пока трекеры начнут подключаться к модулю. Информацию об этом процессе вы будете наблюдать в консоли. Если подключение происходит корректно, авторизация трекеров выполняется верно, трекеры начинают присылать информацию, которая передается в USERSIDE корректно, то можно считать, что тестовый запуск прошел успешно. Если возникают какие-то проблемы на данном этапе, обратитесь пожалуйста в службу поддержки создав тикет или задайте вопрос сообществу в нашей Телеграм-группе.
- Остановите работу модуля клавишами ctrl+c и восстановите настройки блока log файла settings.ini:
[log] level = 2 to_console = no
Теперь модуль готов к эксплуатации.
Supervisor
Для автоматического контроля работы модуля и его перезапуска в случае проблем, рекомендуем использовать supervisor. Пример конфигурационного файла для supervisord поставляется вместе с модулем — это файл etc/supervisor/conf.d/usm_gps.conf-example. Находясь в каталоге с модулем, скопируйте конфиг в вашу файловую систему сохраняя путь, но с другим именем (без -example):
sudo cp etc/supervisor/conf.
 d/usm_gps.conf-example /etc/supervisor/conf.d/usm_gps.conf
d/usm_gps.conf-example /etc/supervisor/conf.d/usm_gps.conf
По умолчанию пример содержит пути, такие же как в инструкции, но если вы использовали другой каталог для размещения модуля, то измените пути на соответствующие.
Перезапустите supervisor, чтобы он перечитал конфигурационные файлы:
sudo systemctl restart supervisor
Теперь можно посмотреть, в каком состоянии находится модуль:
sudo supervisorctl status usm_gps
Также следите за логами модуля и супервайзера.
Если понадобится остановить модуль, например, для обновления, используйте команду:
sudo supervisorctl stop usm_gps
Чтобы запустить модуль снова:
sudo supervisorctl start usm_gps
Ротация файлов журнала
Файлы журнала, создаваемые модулем, нуждаются в ротации. Для этого следует использовать стандартные инструменты ротации логов в операционной системе.
Следующая настройка будет выполнять ротацию всех файлов *.log ежесуточно и хранить 7 архивных копий (за 7 дней)
Ротация в FreeBSD
В FreeBSD за ротацию отвечает демон newsyslog. Создайте файл /usr/local/etc/newsyslog.conf.d/userside, в который поместите следующую строку (не забудьте про путь, если Вы его изменили):
Создайте файл /usr/local/etc/newsyslog.conf.d/userside, в который поместите следующую строку (не забудьте про путь, если Вы его изменили):
/var/log/userside/*.log 644 7 * @T00 GJC /путь_к_модулю/usm_gps_2/usm_gps.pid
Ротация в Linux
В Linux за ротацию отвечает демон logrotate. Создайте файл /etc/logrotate.d/userside, в который поместите следующий текст (не забудьте про путь, если Вы его изменили):
/var/log/userside/*.log {
rotate 7
daily
compress
delaycompress
missingok
notifempty
copytruncate
}
Обновление модуля
- Скачайте архив с новой версией из личного кабинета на сервер, где работает модуль
- Остановите работу модуля
sudo supervisorctl stop usm_gps
- Удалите все файлы модуля, за исключением settings.ini
- Разархивируйте файлы из архива с новой версией на место старых файлов
- Обязательно установите (обновите) зависимости:
sudo .
 /venv/bin/pip install --upgrade -r requirements.txt
/venv/bin/pip install --upgrade -r requirements.txt
- Запустите модуль
sudo supervisorctl start usm_gps
Запросы на реализацию нового протокола
Трекеры одной и той же модели могут иметь разные телекоммуникационные протоколы взаимодействия с сервером. Особенно это касается дешевых «китайских» трекеров вроде GT06. Оборудование трекера может изготавливать один и тот же завод, а вендор-заказчик может устанавливать в трекер собственную прошивку.
Поэтому мы не используем понятие поддержки модели трекера, а используем понятие поддержки протокола.
Если Вы приобрели трекер, то первым делом нужно узнать, какой протокол он поддерживает. Обычно такая информация находится в описании устройства. Если же такой информации нет, вы можете попробовать подобрать протокол по модели трекера в списке, указанном выше. Включите все имеющиеся в модуле протоколы и перезапустите его. Затем изменяйте в настройках трекера порт таким образом, чтобы использовались различные протоколы модуля. Если подходящий протокол найден — вам повезло. Используйте его. Если же нет, то вы можете воспользоваться специальным протоколом «тест» (порт по умолчанию 9999), который просто выводит в лог принятый от трекера пакет в шестнадцатиричном представлении. Далее вам нужно создать тикет через тикет-систему с темой usm_gps поддержка протокола…. В тексте тикета опишите ваш трекер и приложите строки модуля, начинающиеся с
Если подходящий протокол найден — вам повезло. Используйте его. Если же нет, то вы можете воспользоваться специальным протоколом «тест» (порт по умолчанию 9999), который просто выводит в лог принятый от трекера пакет в шестнадцатиричном представлении. Далее вам нужно создать тикет через тикет-систему с темой usm_gps поддержка протокола…. В тексте тикета опишите ваш трекер и приложите строки модуля, начинающиеся с RX-SAMPLE:.
Если вы располагаете информацией о протоколе, поддержку которого необходимо добавить в модуль, а также любой другой информацией (документацией или где ее получить) — обязательно прикрепляйте всю имеющуюся информацию к тикету. Это очень сильно увеличит шансы на более быструю разработку для вас.
Что такое GPS?
ЧТО ТАКОЕ GPS?
СИСТЕМЫ ДИФФЕРЕНЦИАЛЬНОЙ КОРРЕКЦИИ
|
СИСТЕМА ГЛОБАЛЬНОГО ПОЗИЦИОНИРОВАНИЯ GPSNAVSTAR GPS (англ. Космический сегмент Наземные станции контроля космического сегмента Пользовательский сегмент По возможностям приема сигналов GPS приемники делятся на кодовые — способные принимать и обрабатывать только CA-код на частоте L1; фазовые одночастотные — способные помимо CA-кода принимать и обрабатывать фазу несущей частоты L1; двух- или мультичастотные — приемники, способные принимать и обрабатывать фазы несущих L2/L2C и новой частоты L5 соответственно, а также, мультисистемные, (т. Помимо приема сигналов системы NAVSTAR, в GPS-приемниках может быть предусмотрена возможность приема сигналов различных систем дифференциальной коррекции, улучшающих точность позиционирования. По области применения GPS приемники обычно делятся на бытовые или навигационные (т.н. GPS навигаторы — автомобильные, туристические, спортивные), автономная точность позиционирования которых не превышает 3-5 м. и профессиональные. Более подробную информацию о системе NAVSTAR GPS, и о статусе спутников можно найти по ссылке Материал из Википедии — свободной энциклопедии |
 NAVigation Satellites providing Time And Range; Global Positioning System — обеспечивающие измерение времени и расстояния навигационные спутники; глобальная система позиционирования) — спутниковая система навигации, часто именуемая GPS. Позволяет в любом месте Земли (включая приполярные области), почти при любой погоде, а также в космическом пространстве вблизи планеты определить местоположение и скорость объектов. Система разработана, реализована и эксплуатируется Министерством обороны США.
NAVigation Satellites providing Time And Range; Global Positioning System — обеспечивающие измерение времени и расстояния навигационные спутники; глобальная система позиционирования) — спутниковая система навигации, часто именуемая GPS. Позволяет в любом месте Земли (включая приполярные области), почти при любой погоде, а также в космическом пространстве вблизи планеты определить местоположение и скорость объектов. Система разработана, реализована и эксплуатируется Министерством обороны США.
 Максимальное возможное число одновременно работающих спутников в системе NAVSTAR ограничено 37.
Максимальное возможное число одновременно работающих спутников в системе NAVSTAR ограничено 37.Глобальная система позиционирования — Wiki
Глобальная система позиционирования (GPS) — это спутниковая навигационная система, предоставляющая услуги позиционирования, навигации и синхронизации гражданским и военным пользователям. GPS — это принадлежащая США утилита, поддерживаемая и управляемая Космическими силами США. GPS получает данные о местоположении и времени, отправляя и получая радиосигналы между приемниками GPS и тридцатью одним спутником на средней околоземной орбите.
Существуют еще три спутниковые навигационные системы, предоставляющие аналогичные услуги:
- ГЛОНАСС — разработана и эксплуатируется Российской Федерацией
- Galileo — разработана и эксплуатируется Европейским Союзом
- BeiDou — разработана и эксплуатируется Китаем
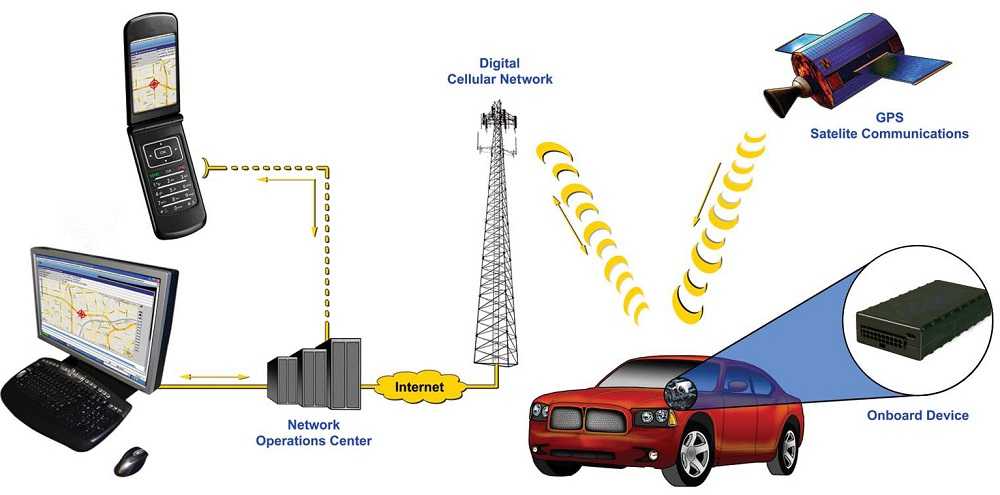
Принцип работы
GPS состоит из трех сегментов:
3
3 сегмент — спутники Сегмент управления — наземные станции Сегмент пользователя — приемники Спутники GPS оснащены атомными часами, которые обеспечивают точную информацию о времени. Спутники излучают радиосигналы, содержащие эту информацию о времени, измеренную приемниками GPS, которые вычисляют разницу во времени между отправкой сигнала и его приемом. По этой разнице во времени приемник может определить свое расстояние от спутника.
Рассчитав расстояние до трех спутников, приемник может определить свое трехмерное положение на Земле. Однако для точного вычисления расстояния от каждого спутника требуются еще одни синхронизированные атомные часы. Проведение измерений с четвертого спутника означает, что каждому приемнику не нужны собственные атомные часы. Таким образом, GPS требует, чтобы приемник принимал сигналы от четырех спутников, чтобы точно вычислить широту, долготу, высоту и время.
Наземные станции используют радар для мониторинга, обслуживания и управления положением каждого спутника, а также для корректировки спутниковых часов.
История
Разработанный американскими военными в 1960-х годах, первый экспериментальный GPS-спутник Block-I производства Rockwell International был запущен в феврале 1978 г. В декабре 1993 г. была достигнута первоначальная эксплуатационная готовность системы GPS с полной группировкой из двадцати четырех спутников на орбите к 17 января 1994 года.
В 1996 году президент Билл Клинтон издал политическую директиву, объявляющую GPS системой двойного назначения как для гражданского, так и для военного использования, учреждая межведомственный исполнительный совет GPS для управления ею как национальное достояние.
Applications
GPS имеет широкий спектр применений в многочисленных отраслях, в том числе следующие:
- военные
- Aviation
- Marine
- Farming
- Telecommunications
GPS_COMMON -ROS WIKI
9008
gps_common -ROS WIKI
9008
gps_common -Ros Wiki
9008
gps_common -viki
9008
GPS
Показать дистрибутивы EOL: Статус документации
gps_umd : gps_common | gpsd_client
Нет документации API
Сообщения GPS и общие процедуры для использования в драйверах GPS
- Автор: Поддерживается Ken Tossell
- Лицензия: BSD
- Репозиторий: umd-ros-pkg
- Источник: git git://ram. umd.edu/ros/gps_umd.git
: gps_common | gpsd_client
Документировано
Сообщения GPS и общие процедуры для использования в драйверах GPS
- Автор: Поддерживается Ken Tossell
- Лицензия: BSD
- Источник: git git://ram.umd.edu/ros/gps_umd.git (ветка: master)
gps_umd : gps_common | gpsd_client
Документировано
Сообщения GPS и общие процедуры для использования в драйверах GPS
- Автор: Поддерживается Ken Tossell
- Лицензия: BSD
- Источник: git https://github.com/ktossell/gps_umd.git (ветка: master)
gps_umd : | gpsd_client
Документировано
Сообщения GPS и общие процедуры для использования в драйверах GPS
- Сопровождающий: Timo Roehling
![]() fraunhofer DOT de>
fraunhofer DOT de> - Автор:
- Лицензия: BSD
- Источник: git https://github.com/ktossell/gps_umd.git (ветка: master)
gps_umd : gps_common | gpsd_client
Выпущено
Документировано
Сообщения GPS и общие процедуры для использования в драйверах GPS
- Сопровождающий: Тимо Ролинг
- Автор:
- Лицензия: BSD
- Источник: git https://github.com/ktossell/gps_umd.git (ветка: master)
gps_umd : gps_common | gpsd_client
Выпущено
Задокументировано
Сообщения GPS и общие процедуры для использования в драйверах GPS
- Статус сопровождающего: поддерживается
- Сопровождающий: Тимо Роелинг
- Автор:
- Лицензия: BSD
- Источник: git https://github. com/swri-robotics/gps_umd.git (ветка: master)
gps_umd : gps_common | gpsd_client
Выпущено
Задокументировано
Сообщения GPS и общие процедуры для использования в драйверах GPS
- Статус сопровождающего: поддерживается
- Сопровождающий: Тимо Роелинг
- Автор:
- Лицензия: BSD
- Источник: git https://github.com/swri-robotics/gps_umd.git (ветка: master)
gps_umd : gps_common | gpsd_client
Выпущено
Задокументировано
Сообщения GPS и общие процедуры для использования в драйверах GPS
- Статус сопровождающего: поддерживается
- Сопровождающий: Тимо Роелинг
- Автор:
- Лицензия: BSD
- Источник: git https://github. com/swri-robotics/gps_umd.git (ветка: master)
gps_umd : gps_common | gpsd_client
Выпущено
Задокументировано
Сообщения GPS и общие процедуры для использования в драйверах GPS
- Статус сопровождающего: поддерживается
- Сопровождающий: Тимо Роелинг
- Автор:
- Лицензия: BSD
- Источник: git https://github.com/swri-robotics/gps_umd.git (ветка: master)
gps_umd : gps_common | gpsd_client
Выпущено
Документировано
Сообщения GPS и общие процедуры для использования в драйверах GPS
- Статус сопровождающего: разработано swri DOT org>
- Автор:
- Лицензия: BSD
- Источник: git https://github.com/swri-robotics/gps_umd.git (ветка: master)
gps_umd : gps_common | gpsd_client
Выпущено
Задокументировано
Сообщения GPS и общие процедуры для использования в драйверах GPS
- Статус сопровождающего: поддерживается
- Сопровождающий: Тимо Роелинг
![]() roehling AT fkie.fraunhofer, DOT. swri DOT org>
roehling AT fkie.fraunhofer, DOT. swri DOT org> - Автор:
- Лицензия: BSD
- Источник: git https://github.com/swri-robotics/gps_umd.git (ветка: master)
Содержание
- Экспериментальный пакет
- Сообщения
- Узлы
- utm_odometry_node
- Темы с подпиской
- Опубликованные темы
- Параметры
- Учебник
Экспериментальный пакет
Этот пакет представляет собой пространство для промежуточных сообщений и общих процедур обработки GPS, которые проходят процесс стандартизации. Его содержимое, вероятно, будет перемещено в ros-pkg, как только оно созреет.
Сообщения
gps_common определяет два общих сообщения для вывода драйверов GPS: gps_common/GPSFix и gps_common/GPSStatus.
В большинстве случаев эти сообщения должны публиковаться одновременно, с одинаковыми метками времени.
Узлы
utm_odometry_node
utm_odometry_node преобразует показания широты и долготы в одометрию UTM
Темы с подпиской
fix (sensor_msgs/NavSatFix)
- Измерение и состояние GPS
Опубликованные темы
ODOM (NAV_MSGS/Odometry)
- UTM-кодируемая позиция
Параметры
~ ROT_COVARIANCE (
Double, 90999999999).
Спутники излучают радиосигналы, содержащие эту информацию о времени, измеренную приемниками GPS, которые вычисляют разницу во времени между отправкой сигнала и его приемом. По этой разнице во времени приемник может определить свое расстояние от спутника. В декабре 1993 г. была достигнута первоначальная эксплуатационная готовность системы GPS с полной группировкой из двадцати четырех спутников на орбите к 17 января 1994 года. umd.edu/ros/gps_umd.git com/swri-robotics/gps_umd.git (ветка: master) com/swri-robotics/gps_umd.git (ветка: master)- utm_odometry_node
- Темы с подпиской
- Опубликованные темы
- Параметры