Руки у регулировщика опущены руки: сигналы регулировщика
Сигналы регулировщика доступным языком
Для многих водителей, регулировщик является одной из самых больших проблем на дороге, но сигналы регулировщика доступным языком освоить можно за пять минут. Конечно сталкиваться с ним часто во время движения транспортного средства не приходится, но бывают случаи, когда это происходит внезапно, поэтому знать и понимать язык жестов необходимо.ЭТО СЛЕДУЕТ ПОМНИТЬ: Если на перекрестке стоит регулировщик, то вы никак не должны реагировать на светофор и дорожные знаки. С того момента, как он занял свою позицию он стал единственным, кого стоит слушаться.
СКОЛЬКО ВСЕГО СИГНАЛОВ У РЕГУЛИРОВЩИКА?
У регулировщика не так много сигналов, поэтому и запоминать их долго не придется. Как видно на картинке внизу их всего три:
правая рука вверх;
руки разведены;
правая рука вытянута вперед.
КАК ВЫУЧИТЬ И НЕ ЗАБЫТЬ СИГНАЛЫ РЕГУЛИРОВЩИКА
Несмотря на теоретическое знакомство, регулировщик на дороге – явление редкое, как и говорилось выше его появление водители расценивают как диво-дивное, и порой даже опытные участники движения теряются в такой ситуации.
Палка верх устремлена – всем стоять велит она.
Если палка смотрит вправо — ехать не имеешь права.
Если палка смотрит в рот — делай правый поворот.
Если палка смотрит влево — поезжай как королева.
«Голые» грудь и спина — для водителя стена!
Общая схема подсказывает, как должны вести себя участники движения, находящиеся с разных сторон от инспектора.
Давайте разберем сигналы регулировщика подробно, согласно стишку.
Первая строчка стишка:
Палка верх устремлена – всем стоять велит она.
Если инспектор поднял руку вверх, при этом абсолютно не важно, какой частью корпуса он к вам повернулся, то все без исключения участники движения на дороге: и водители транспорта, и пешеходы должны стоять на месте. Категорически запрещено движение в любых направлениях.
Категорически запрещено движение в любых направлениях.
Сигнал «рука вверх» необходим для расчистки перекрестка, и применяется, главным образом, чтобы пропустить специальный транспорт.
Если регулировщик поднял палку вверх, то пешеходы и водители обязаны остановиться
Вспоминаем дальше стишок про регулировщика:
Если палка смотрит вправо — ехать не имеешь права.
Сигнал должен расцениваться как красный свет светофора, что означает: транспортные средства, оказавшиеся справа от инспектора-регулировщика, обязаны остановиться и дожидаться следующих указаний.
Продолжаем разбирать стишок про регулировщика:
Если палка смотрит в рот — делай правый поворот.
Если инспектор к вам повернулся грудью и направил жезл в вашу сторону (прямо на вас), то вы смело можете поворачивать направо, но в других направлениях вам движение запрещено.
Жезл направлен строго на вас, значит, можно поворачивать только вправо.
Идем дальше:
Если палка смотрит влево — поезжай как королева.
В этом случае к вам регулировщик стоит боком, стихи для запоминания однозначно отражают его сигнал: вы можете двигаться во всех направлениях. Исключение — трамваям, которые двигаются по туннелям рукавов, им разрешено двигаться только налево.
Если жезл инспектор направил влево, то смело можно двигаться в любом направлении, но не следует забывать о знаках и разметке
И последняя строка стишка:
«Голые» грудь и спина — для водителя стена!
Если инспектор развернулся к вам спиной или лицом, запрещено любое движение транспорта. Этот сигнал регулировщика идентичен правилу: «Палка верх устремлена – всем стоять велит она».
Если регулировщик развернулся к вам спиной или лицом — это равносильно красному сигналу светофора, движение строго запрещено
Когда инспектор стоит к вам лицом либо развернут спиной, а руки его разведены в сторону, то вам движение строго запрещено, а автомобили, двигающиеся по перпендикулярной полосе, могут ехать «из рукава в рукав».
Пешеход, равно как и водитель, является полноправным участником дорожного движения, поэтому ПДД и сигналы регулировщика важно знать обоим категориям граждан.
Сигналы регулировщика — что означают знаки и жесты в Украине
Иногда водители не выполняют требования регулировщика, не потому, что его не замечают, а потому, что не знают значение его сигналов.
Для того, чтобы помочь водителям безопасно проехать, а пешеходам – перейти перекресток рекомендуем вам освежить знания о значении сигналов регулировщика и перечитать для этого пункт 8.8 Правил дорожного движения.
Читайте также: Нет секса, поэтому инвалид: кто паркует машины на запрещенных местах
Сигналы регулировщика имеют преимущество перед сигналами светофоров и требованиями дорожных знаков и являются обязательными для исполнения.
В соответствии с пунктом 8.8. Правил дорожного движения Украины сигналы регулировщика – это положение его корпуса, а также жесты руками, в том числе с жезлом или диском с красным светоотражателем, которые имеют следующие значения:
Для водителей автомобилей:
Регулировщик дорожного движения стоит лицом или спиной к Вам.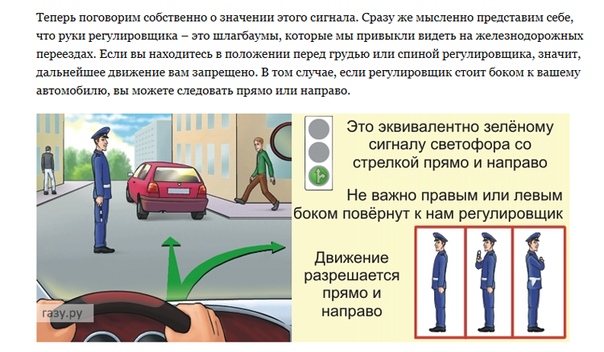 Руки его разведены в сторону, опущены вниз или согнуты перед грудью правая рука с жезлом (красным диском) влево (фото 3, фото 4) – движение запрещено во все стороны. Это положение регулятора приравнивается к красному сигналу светофора (пункт 8.8 (а) ПДД).
Руки его разведены в сторону, опущены вниз или согнуты перед грудью правая рука с жезлом (красным диском) влево (фото 3, фото 4) – движение запрещено во все стороны. Это положение регулятора приравнивается к красному сигналу светофора (пункт 8.8 (а) ПДД).
Регулировщик стоит лицом к Вам. Его правая рука, держащая жезл (красный диск), вытянута вперед, то есть к Вам – движение запрещено прямо, а направо (патрульная на фото 1) – движение разрешено. Это положение регулятора означает красный сигнал светофора с зеленой стрелкой вправо (пункт 8.8 (б) ПДД).
Рука регулировщика с жезлом поднята вверх (фото 2). При этом он стоит к Вам любым боком (фото 2) – этот жест означает, что сейчас изменится движение на перекрестке. Такое положение означает “Внимание!” и желтый сигнал светофора. Автомобили (как и все другие участники дорожного движения) должны покинуть перекресток, движение транспорта запрещено (пункт 8.8 (в)).
Регулировщик стоит к вам левым боком с вытянутой вперед рукой с жезлом (патрульный на фото 1) – разрешается ехать в любом направлении: направо, налево, прямо, а также разворачиваться.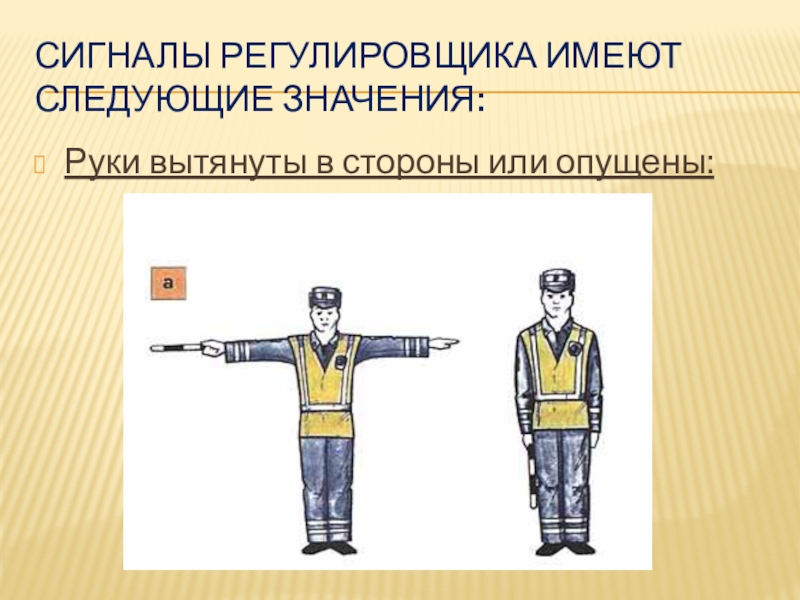 Этот сигнал регулировщика означает зеленый свет светофора (пункт 8.8 (б) ПДД).
Этот сигнал регулировщика означает зеленый свет светофора (пункт 8.8 (б) ПДД).
Если регулировщик стоит левым боком к Вашей машине, а его руки опущены вниз, вытянуты по сторонам или согнуты и прижаты к груди – можно ехать прямо или направо, сначала пропустив пешеходов. Такой сигнал означает зеленый свет светофора, но с запретом левого поворота (пункт 8.8 (а) ПДД).
Запомните! Когда регулятор движения стоит к вам лицом или спиной – прямо ехать Вам нельзя. Регулировщик может подавать другие сигналы, понятные водителям и пешеходам.
Патрульные обращаются ко всем водителям, обновите в памяти значения сигналов регулировщика – ведь каждый раз находятся те, кто их не знает, в результате чего образуются пробки.
Напомним, что делать, если полицейский остановил вас незаконно.
Как запомнить сигналы регулировщика движения
Регулировщик на дороге – довольно редкое явление и, видимо, именно по этой причине многие впадают в ступор, когда его видят (ведь навыки теряются, если регулярно не подкреплять теорию практикой). В особенности это касается новичков на дорогах.
В особенности это касается новичков на дорогах.
Несмотря на весь тот ужас, который регулировщик нагоняет на многих водителей, бояться его не стоит. Как показывает практика, если жесты будут не понятны водителю, то регулировщик обязательно подскажет. Он стоит исключительно в целях вашей безопасности. Но если же все таки страх не утихает, то можно пропустить кого-либо вперед себя и следовать за ним.
Сейчас попробуем доступно объяснить, как понимать регулировщика. В первую очередь следует запомнить несколько несложных правил:
1. Если на перекрестке стоит регулировщик, то действие как светофоров, так и дорожных знаков теряет свой приоритет.
2. В том случае, когда регулировщик повернут к вам спиной или же лицом движение прямо запрещено.
Сигналы подаются руками, но возможно и использование жезла или свистка. Это делается для лучшей наглядности.
- Как запомнить сигналы регулировщика движения
1. Регулировщик поворачивается к вам лицом.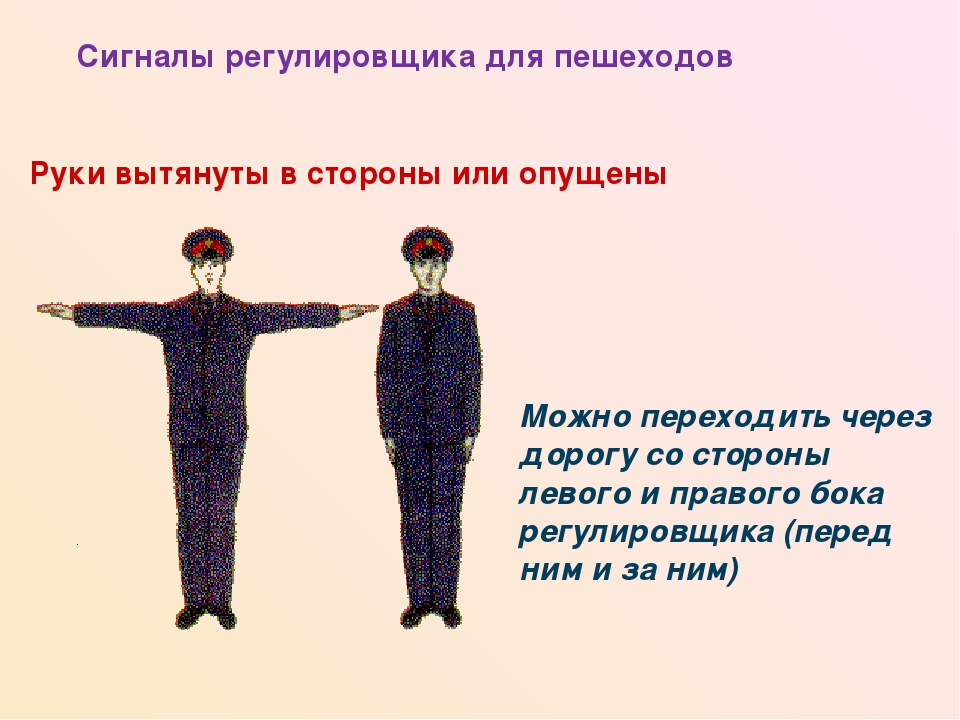 Положение рук может быть разное: опущены, разведены в разные стороны или же правая рука согнута, а жезл в ней повернут влево. Это говорит о красном свете светофора, то есть двигаться в любом направлении запрещено.
Положение рук может быть разное: опущены, разведены в разные стороны или же правая рука согнута, а жезл в ней повернут влево. Это говорит о красном свете светофора, то есть двигаться в любом направлении запрещено.
2. Если регулировщик стоит в таком же положении, как в предыдущем пункте, но корпус повернут к вам боком – это свидетельствует о том, что двигаться прямо и направо позволено. Для трамваев разрешен проезд только прямо. Положение регулировщика боком к пешеходам, дает им право свободно переходить дорогу.
3. При расположении регулировщика к вам лицом с вытянутой в ваше направление рукой, это говорит о запрете на движение прямо, но при этом разрешается движение направо. Данный сигнал показывает красный свет светофора с зеленой стрелкой. Пропускать машины слева и пешеходов не стоит.
4. Если в данном случае регулировщик стоит в положении пункта 3, но правой стороной или спиной в вашу сторону, то двигаться в любом направлении полностью запрещено. Левый бок – можно двигаться в любом направлении. Разворачиваться в данном случае так же разрешается. Для трамваев это сигнал ехать только налево. Пешеходам позволяется за спиной регулировщика перейти дорогу.
Разворачиваться в данном случае так же разрешается. Для трамваев это сигнал ехать только налево. Пешеходам позволяется за спиной регулировщика перейти дорогу.
5. Если рука регулировщика поднята вверх – это означает, что нужно остановить движение во всех направлениях. Этот жест может являться аналогом желтого сигнала светофора, или же говорит о том, что требуется освободить дорогу для проезда спецтранспорта.
6. Если же регулировщик находится левой стороной в вашу сторону, а руки при этом в одном из трех положений: внизу, раздвинуты по сторонам, прижаты к груди, то можно спокойно двигаться прямо или направо, но при этом сперва нужно пропустить пешеходов. Данный жест — аналог зеленого света, однако с запретом на поворот налево.
- Как запомнить сигналы регулировщика движения
Стоит запомнить, что повернутый спиной регулировщик говорит о красном свете светофора. Что касается трамваев, то для них движение допустимо только вдоль рук регулировщика. Если же в процессе движения на перекрестке регулировщик сменил свое положение — следует продолжить движение, дабы избежать экстренного торможения.
Если же в процессе движения на перекрестке регулировщик сменил свое положение — следует продолжить движение, дабы избежать экстренного торможения.
Сигналы регулировщика в стихах
Для хорошего усвоения и запоминания сигналов регулировщика ПДД всем начинающим водителям нашей автошколы мы рассказываем маленький стих, выучить его просто и легко! И не нужно запоминать картинки из литературы ПДД.
«Если палка смотрит в рот, делай правый поворот,
Если палка смотрит вправо, ехать не имеешь права,
Если палка на дороге влево, ты на дороге, как королева,
На грудь и спину ехать нельзя — это выросла стена».
Пояснения к стиху о сигналах и жестах регулировщика в стихах 2015:
«палка» — Светящийся жезл в руке регулировщика, черно-белый в полоску
«смотрит в рот» — Дорожный регулировщик подносит и прижимает один конец жезла к своему лицу
«королева» — здесь используется выражение как в шахматах, имея ввиду, что шоферу разрешено двигаться в любом направлении дорожного движения
«стена» — Означает, что проезд запрещен, регулировщик дорожного движения может стоять к водителю спиной и грудью.
Очень важно не забывать, если регулировщик движения взмахнул жезлом — дорожные знаки и светофоры прекращают свое действие на время!
регулировщик пдд
Сигналы регулировщика движения на перекрестке являются приоритетными. Регулировщик движения, если он находится на перекрестке, его сигналы являются приемущественными по отношению к дорожным знакам и сигналам светофора, которые тоже могут находиться на перекрестке.
То есть водители автомобилей, подъезжая к такому перекрестку с регулировщиком, должны ориентироваться на его сигналы и жесты.
Не все понятно порой, как поступать при том или ином жесте регулировщика движения. Сегодня мы разберем эту тему более подробно и опишем все жесты регулировщика, которые отображены на картинках.
Разберем в самом начале разрешает ли жест регулировщика выехать на перекресток или нет, без определения направления.
Основных положений у регулировщика три.
Когда регулировщик стоит на перекрестке большое значение имеет то, какой стороной он к Вам повернулся.
Если брать четыре стороны регулировщика: «левое плечо», «правое плечо», «грудь», и «спина»,
то движение разрешено всегда только с двух сторон, соответственно с двух других движение запрещено.
Причем если регулировщик стоит к Вам спиной движение будет запрещено всегда.
Для того, чтобы определить можете ли Вы проехать перекресток, нужно посмотреть — попадаете ли Вы в «рукав» инспектора.
Разберем первое изображение. Регулировщик стоит с поднятыми руками, как вариант руки могут быть опущены.
Движение разрешено если Вы подъезжаете с правого плеча или с левого (попадаем в рукав), а вот со стороны спины и груди движение запрещено.
На фотографии 2 правая рука вытянута вперед, левая опущена.
В этом случае движение разрешено со стороны левого плеча (представте себе, что левая рука инспектора поднята) и со стороны груди.Со спины и правого плеча движение запрещено.
На фотографии 5 видно, что со стороны правого плеча «в рукав» Вы не попадаете. Значит движение в любом из направлений Вам запрещено.
Значит движение в любом из направлений Вам запрещено.
На 3 фото правая рука поднята вверх.
При таком положении регулировщика движение запрещено со всех четырех сторон. В том случае при подъезде к перекрестку Вы должны остановиться у стоп-линии перед перекрестком.
Но если ругулировщик поднял руку вверх после того как Вы въехали на перекресток, Вы должны закончить проезд перекрестка в намеченном направлении.
Такое положение заменяет «желтый сигнал» светофора, т.е является переходным от одного положения регулировщика к другому.
Теперь давайте определимся с направлением движения.
Проще это запомнить если за основу взять движение трамваев.
У трамваев всегда только одно разрешенное направление, так называемое «из рукава в рукав», т.е в направлении рук.
На фото 4 со стороны груди регулировщика (попадая в рукав) трамвай может двигаться только направо и все безрельсовые ТС тоже только направо.
На фото1 трамвай со стороны правого или левого плеча только прямо, а безрельсовые ТС могут проехать перекресток прямо и повернуть направо.
На фото 2 со стороны левого плеча трамвай налево, безрельсовые ТС во всех направлениях.
Если обобщить все выше изложенное, то получается, что когда регулировщик разрешает движение, можно двигаться по направлению рук т.е. «из рукава в рукав» и правее.
Только не следует забывать, что регулировщик движения показывает общее разрешенное направление.
Рассмотрим перекресток на котором две или более полос для движения в одном направлении.
Вы подъезжая к перекрестку находитесь в крайнем правом ряду, а регулировщик стоит к Вам левым плечoм с поднятой правой рукой, что разрешает движение во всех направлениях,
это не дает Вам право повернуть налево или совершить разворот, Вы находитесь в крайнем правом ряду, а значит Вы можете продолжить движение только прямо или направо.
Правила маневрирования никто не отменял.
Жесты регулировщика в картинках
В современном мире движение по основным дорогам города регулируется автоматически светофорами, знаками и разметкой на дороге. Нечасто на дорогах встретишь регулировщика, но если уж такое случается, то нужно четко знать и понимать, что своими жестами он хочет до вас донести.
Встреча с регулировщиком на дороге у некоторых автомобилистов вызывает панику, т.к. не все понимают «азбуку его движений». Это приводит к ситуациям, когда водитель пытается ценою мелких нарушений проскочить регулируемый участок дороги, невзирая на знаки сотрудника ДПС. Напомним, что за незнание и за не следование жестам регулировщика предусмотрен штраф.
Содержание:
- Общие правила
- Жесты регулировщика
- Конкретные примеры
Общие правила
Существует несколько общих правил, которые необходимо помнить в случае участия в движении, управляемом сотрудником ДПС:
- присутствие регулировщика на дороге автоматически отменяет сигналы светофора и знаки, расположенные на этом участке;
- регулированию подчиняются все без исключения участники дорожного движения;
- регулировщик имеет возможность сигнализировать жезлом, диском со светоотражающими элементами, или просто руками;
- иногда для привлечения внимания всех участников движения, сотрудник ДПС может подавать звуковые сигналы свистком.


Жесты регулировщика
Предлагаем рассмотреть жесты регулировщика в картинках, что позволит легче понять и запомнить основные из них.
Существует три самых основных положения рук, которые нужно знать.
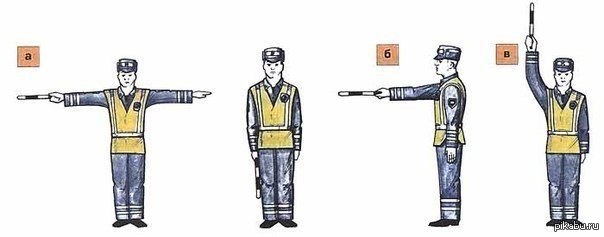
- Регулировщик находится с прижатыми по бокам руками или его руки подняты перпендикулярно телу в стороны (рис.А)
В случае, когда торс регулировщика повернут к вам боком, это равноценно включенному зеленому сигналу светофора с невозможностью осуществления поворота налево. Данный сигнал позволяет осуществлять проезд прямо, а также поворот направо. Для машин, к которым регулировщик обращен лицом либо спиной, движение запрещено. - Регулировщик правую руку вытянул вперед (рис. Б)
Здесь есть два варианта:
в случае лицевого расположения регулировщика к вам, движение прямо запрещено, а поворачивать направо можно;
в случае расположения регулировщика левой стороной, относительно вас, это равноценно зеленому свету светофора, т.е. вы имеете право выполнять любой маневр (повороты, развороты и движение прямо). - Регулировщик держит правую руку поднятой вверх (рис.В)
Этот сигнал обозначает «ВНИМАНИЕ» и равноценен желтому свету светофора. В это время все участники движения должны остановиться, а те, кто находится на перекрестке, освободить его. Данный жест подается регулировщиком при каждой смене сигнала.

Существует еще несколько вспомогательных жестов, позволяющих более активно регулировать движение на дороге. Вот они:
- движение жезлом по кругу в районе груди указывает на то, что участники движения, находящиеся по правую и по левую руку от регулировщика, должны ускориться;
- взмахи сверху вниз и слева направо левой рукой регулировщика призывают ускориться при повороте налево;
взмахи рукой регулировщика сверху внизу и направо призывают ускориться в повороте в правую сторону.
Конкретные примеры
Для закрепления вышеописанной теории необходимо рассмотреть ее применительно к конкретному транспортному средству на конкретном участке дороги. В этом помогут нижеследующие рисунки.
В этом помогут нижеследующие рисунки.
Рис. 1. При таком положении тела регулировщика движение для всех участников движения запрещено.
Рис. 2. При таком положении регулировщика движение прямо для вашего автомобиля запрещено. Есть возможность повернуть направо. При этом вы не уступаете дорогу пешеходам и машинам, движущимся слева.
Рис. 3 Такое положение регулировщика означает знак «ВНИМАНИЕ» и идентично желтому сигналу светофора.
Рис. 4. И вновь движение куда бы то ни было для вас ограничено.
Рис.5. И в этом положении регулировщик запрещает вам ехать в каком бы то ни было направлении.
Рис. 6. Такой сигнал регулировщика открывает вам путь прямо и направо (здесь вы обязаны сначала пропустить пешеходов), но закрывает поворот налево.
Рис. 7. При таком сигнале регулировщика вы можете осуществлять любой маневр транспортным средством (ехать вперед, осуществлять поворот в любую сторону, производить разворот).
Заучите эти несложные жесты регулировщика и помните, что незнание правил не освобождает вас от ответственности!
Читайте также:
Руки регулировщика опущены вниз.
 Сигналы регулировщика: легко и просто
Сигналы регулировщика: легко и простоСегодня утром по дороге на работу, как всегда, попал в небольшую пробку. За то что пробка небольшая необходимо поблагодарить нашу доблестную полицию. Это ни в коем случае на сарказм, а действительно стоящие на нескольких перекрестках подряд регулировщики вносят весомый вклад в увеличение пропускной способности дороги. Практически каждый день вижу водителей, которые не понимая жестов регулировщика, стоят на месте при размещающем движение жесте и наоборот едут, когда им это запрещено. Сегодня хотел затронуть жесты регулировщика в картинках с пояснениями.
Жестам регулировщика на теоретических занятиях по подготовке водителей в автошколах уделяется внимания ровно столько же, сколько и сигналам светофора. В реальных дорожных условиях получаем, что сигналы светофора, по крайней мере с трехцветной световой сигнализацией (красный, желтый зеленый), знают все водители, а жесты регулировщика далеко не все.
Этому есть достаточно простое объяснение: на пути следования светофоры встречаются достаточно часто, а регулировщик организовывающий движение на перекрестке встречается крайне редко. Отсюда и результат:
Отсюда и результат:
- изучив сигналы светофора мы их используем при движении ежедневно и забыть их попросту не получается;
- изучив жесты регулировщика и не сталкиваясь с ними ежедневно при движении, мы их начинаем забывать.
С пешеходами — отдельная песня. Если “самый плохой“водитель знал жесты сотрудника ГИБДД, но забыл, то в большинстве своем пешеходы вовсе и не знали значение жестов.
Всего 3 жеста
Кто-то скажет, что регулировщик показывает невообразимые вещи, понять которые может только он сам, а водителям в них никогда не разобраться. Сейчас я развею этот миф. Согласно ПДД у регулировщика есть всего три жеста. И далее мы разберемся как понять их значения и куда можно, и можно ли двигаться водителю тех или иных транспортных средств и пешеходу
Рука поднята вверх
Данный жест самый простой для восприятия. Он говорит о том, что движение всех транспортных средств (рельсовых и безрельсовых), а также пешеходов запрещено. Движение могут продолжить лишь те, кого этот сигнал застал на перекрестке, они должны незамедлительно завершить маневр, то есть покинуть перекресток. Другими словами это запрещающий жест.
Другими словами это запрещающий жест.
Руки вытянуты в стороны или опущены вниз
Вытянутые в стороны руки и руки опущенные вниз — это один о тот же жест. На дороге случается парадокс, а именно регулировщик опустил руки вниз и есть такие “водители”, трактующие этот жест по своему. Например, регулировщик “опустил руки” и не принимает участие в организации дорожного движения, то есть руководствуются светофором, а точнее его сигналами и дорожными знаками действующими на данном перекрестке.
Каково же значение жеста? Со стороны левого и правого бока движение автомобилей, а если в широком смысле слова, то безрельсовых транспортных средств разрешено прямо и направо. При повороте направо необходимо в обязательном порядке уступить дорогу пешеходам, причем не важно есть ли там пешеходный переход или его нет. Со стороны груди, ровно как и со спины движение строжайшим образом запрещено.
Трамваи со стороны левого, а также правого бока могут двигаться только в прямом направлении. Пешеходы соответственно переходят дорогу, так где это безопасно: впереди регулировщика и за его спиной.
Пешеходы соответственно переходят дорогу, так где это безопасно: впереди регулировщика и за его спиной.
Правая рука вытянута вперед, левая опущена вниз или вытянута в сторону
Положение левой руки здесь не имеет значения, так как все равно это один и тот же жест.
Безрельсовые транспортные средства со стороны левой руки могут двигаться во всех направлениях (прямо, направо, налево и в обратном направлении). Естественно при повороте направо и налево водитель должен уступить дорогу пешеходам, переходящим ту проезжую часть на которую он собирается повернуть. Движение со стороны груди допускается только в одном направлении — направо. Движение со стороны спины, ровно как и со стороны правого бока — запрещено.
Теперь разберемся как двигать в таком случае трамваю. Со стороны левого бока — только налево, со стороны груди — только направо.
Пешеходам безопасно будет переходить проезжую часть только под прикрытием спины регулировщика, а точнее за ней.
Как быстро и просто запомнить вышесказанное
Все вышеперечисленное, а это несколько десятков строк можно ужать до двух предложений. Такая трактовка жестов применялась еще в автошколах Советского Союза:
Такая трактовка жестов применялась еще в автошколах Советского Союза:
- Безрельсовые транспортные средства могут начинать движение только в том случае если на них указывает рука регулировщика и двигаться должны таким образом, чтобы не пересечь рук регулировщика;
- Трамваи двигаются “из рукава в рукав” регулировщика.
Еще раз напомню, что вытянутая в сторону и опущенная в низ рука это абсолютно то же самое.
Веселые стишки
Есть еще два прикольных, но поучительных стишка, помогающих быстро запомнить информацию. Ем уже очень много лет, а они и сейчас актуален.
На этом будем считать тему раскрытой полностью. Если у Вас уважаемые читатели возникнут вопросы, я буду рад на них ответить, оставляйте комментарии. Да, чуть не забыл, информация для тех, кому скоро сдавать экзамен по ПДД — это мои советы . До скорой встрече на страницах блога!
11 ноября 2017Каждый водитель знает, что перекрестки регулируются знаком светофора. Но бывают ситуации, когда на дороге стоит регулировщик и задает направление вашего движения. Порой автомобилисты сталкиваются с трудностями, забыв, что означают его команды.
Но бывают ситуации, когда на дороге стоит регулировщик и задает направление вашего движения. Порой автомобилисты сталкиваются с трудностями, забыв, что означают его команды.
Указания могут быть как жезлом, так и рукой. От этого смысл команды не меняется. Для привлечения внимания, регулировщик может использовать свисток.
В роли регулировщика может выступать сотрудник полиции или военной автомобильной инспекции. Указания этого человека распространяются на водителей, велосипедистов и пешеходов.
Знаки регулировщика по правилам ПДД
- Правая рука вытянула вверх . Эта команда означает, что водитель не должен обращать внимание на дорожные знаки и светофор. Участник дорожного движения должен остановиться у стоп-линии и ждать сигнала регулировщика, чтобы продолжить движение. Не важно, как повернут к вам сотрудник. Необходимо незамедлительно отреагировать на его действие. Команда распространяется не только на шоферов, но и пешеходов. Правила ПДД гласят: если водителю не удается остановиться по команде регулировщика, он имеет право закончить маневр. Это правило распространяется и на случай, если водитель успел выехать на перекресток до знака регулировщика. В этом случае и сам сотрудник разрешает закончить маневр и освободить проезжую часть, чтобы не создавать помех другим участникам. Поднятая вверх рука ассоциируется с желтым сигналом светофора, который показывает участнику дорожного движения, что необходимо приготовиться к дальнейшим действиям.
- Руки разведены в стороны или опущены . Такое положение говорит о том, что двигаться на грудь и спину сотрудника полиции запрещено. Движение направо и прямо могут продолжать те, к кому он стоит боком. Это правило касается и пешеходов. Они могут продолжать движение только параллельно регулировщику.
- Рука показывает вперед . Если регулировщик смотрит на нас, то ехать разрешено только вправо. Если он стоит правым боком, то движение запрещено. Водитель не имеет право продолжает движение и в том случае, если регулировщик стоит спиной, независимо от того, какие команды показывает. Если он стоит левым боком — движение разрешено во всех направлениях.
 Это правило распространяется и на случай, если водитель успел выехать на перекресток до знака регулировщика. В этом случае и сам сотрудник разрешает закончить маневр и освободить проезжую часть, чтобы не создавать помех другим участникам. Поднятая вверх рука ассоциируется с желтым сигналом светофора, который показывает участнику дорожного движения, что необходимо приготовиться к дальнейшим действиям.
Это правило распространяется и на случай, если водитель успел выехать на перекресток до знака регулировщика. В этом случае и сам сотрудник разрешает закончить маневр и освободить проезжую часть, чтобы не создавать помех другим участникам. Поднятая вверх рука ассоциируется с желтым сигналом светофора, который показывает участнику дорожного движения, что необходимо приготовиться к дальнейшим действиям. Если он стоит левым боком — движение разрешено во всех направлениях.
Если он стоит левым боком — движение разрешено во всех направлениях.Как выучить и не забыть сигналы регулировщика?
Основные правила, позволяющие быстро и легко запомнить сигналы:
- вытянутый жезл задает вектор в каком направлении можно начать движение водителю;
- на спину регулировщика водители не имеют право двигаться независимо от того, какие сигналы он подает;
- трамваи могут передвигаться только вдоль рук инспектора, а автомобилисты имеют право поворачивать направо.
Теоретических знаний о правилах движения, когда на дорогах стоит регулировщик, не всегда достаточно. Даже опытный автомобилист может растеряться и не понять, как ему действовать, при виде сотрудника полиции. Но стих про регулировщикапоможет легко и просто запомнить правила движения в такой ситуации:
Палка вверх устремлена – всем стоять велит она.
Если палка смотрит вправо – ехать не имеешь права.
Если палка смотрит в рот – делай правый поворот.
Если палка смотрит влево – поезжай как королева.
«Голые» грудь и спина – для водителя стена!
Подобная запоминалка поможет вспомнить все нюансы и уверенно продолжить маневр, столкнувшись с ручным регулированием движения.
Но помимо водителей, важно, чтобы и пешеходы знали, как правильно вести себя, если на проезжей части стоит регулировщик. Для этого существует стишок для пеших граждан:
Я стою к тебе лицом –
Потерпи, будь молодцом.
На тебя смотрю я строго –
Значит, занята дорога.
Если руку подниму,
Нет движения никому.
Теперь я боком повернулся –
Путь свободен впереди,
Не зевай, переходи.
Запоминаем сигналы регулировщика по картинке
Есть еще одна хорошая методика, которая позволит быстро запомнить сигналы регулировщика — по картинке. Такой метод подходит для тех, кому наглядные примеры более понятны, чем на словах.
Итак, прежде чем начать или продолжить движение, необходимо обратить внимание на положение рук сотрудника дорожной инспекции.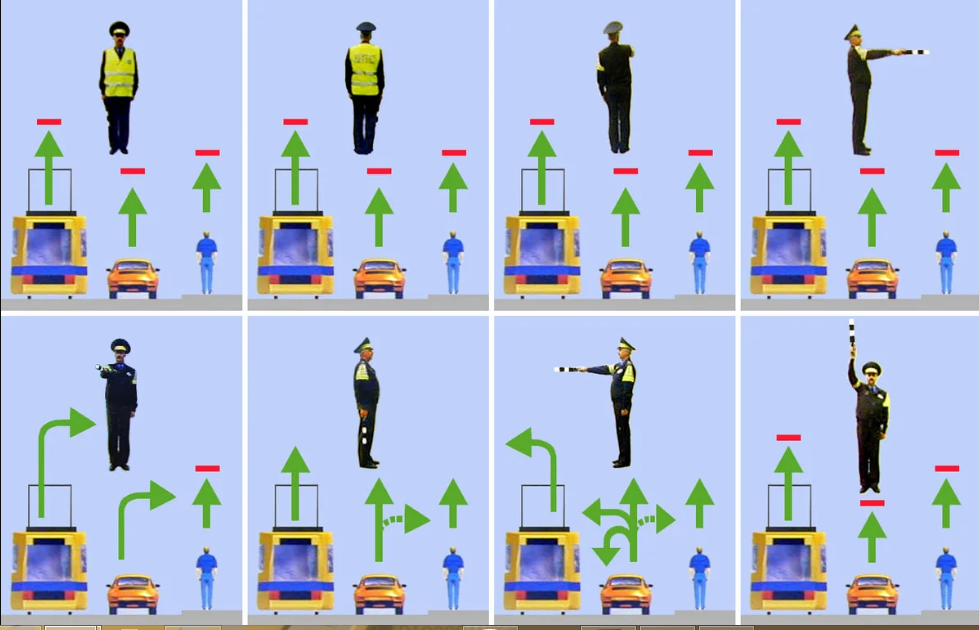 Больше всего возникает вопросов, когда одной рукой регулировщик указывает на вас, а другая прижата вдоль тела. В этом случае мысленно поднимите опущенную руку, и сразу будет понятно, какие направления для движения задает регулировщик. Руки образуют прямой угол, который нельзя пересекать. Поэтому, со стороны правой руки, водители могут повернуть направо. Со стороны мысленно поднятой руки, можно двигаться в любом направлении. Для более наглядного примера, обратите внимание на изображение.
Больше всего возникает вопросов, когда одной рукой регулировщик указывает на вас, а другая прижата вдоль тела. В этом случае мысленно поднимите опущенную руку, и сразу будет понятно, какие направления для движения задает регулировщик. Руки образуют прямой угол, который нельзя пересекать. Поэтому, со стороны правой руки, водители могут повернуть направо. Со стороны мысленно поднятой руки, можно двигаться в любом направлении. Для более наглядного примера, обратите внимание на изображение.
Вообще понять жесты регулировщика очень просто: он задает движение только тем транспортным средствам, на которых указывает рукой. Остальные его не интересуют.
Несмотря на то, что во время регулирования движения специалистом, вы должны обращать внимание лишь на его указания, не стоит забывать и о дорожных знаках. Игнорировать можно лишь те знаки, которые напрямую противоречат сигналам регулировщика. Например, если инспектор стоит на перекрестке, где установлен светофор, в этом случае водитель следует лишь его указаниям. Но помимо этого, на дороге есть еще разметка и стандартные знаки, с которыми регулировщик не вступает в конфликт. Им нужно обязательно следовать, иначе может возникнуть аварийная ситуация.
Но помимо этого, на дороге есть еще разметка и стандартные знаки, с которыми регулировщик не вступает в конфликт. Им нужно обязательно следовать, иначе может возникнуть аварийная ситуация.
Дополнительные знаки регулировщика
Помимо основных знаков, существуют дополнительные, которым также стоит следовать и обязательно обращать внимание:
- регулировщик крутит жезлом перед грудью — необходимо ускорить свое движение. Распространяется для водителей, движущихся со стороны правого и левого плеча;
- елси он резким движение опускает руку и указывает на лево — водителям необходимо быстрее завершить поворот направо;
- сотрудник полиции показал сигнал стоп, но вы выехали на перекресток — завершить маневр, если инспектор смотрит на вас.
Знаки и сигналы регулировщика. Водители обязаны четко следовать им всем. Однако, согласно «Правилам дорожного движения», приоритетными являются сигналы регулировщика. Если требования светофора и дорожного знака отличаются друг от друга, водители руководствуются указаниями первого. Но если, к примеру, и регулировщика противоречат друг другу, следовать нужно последним. Поэтому необходимо знать и понимать жесты сотрудника ГИБДД всем автолюбителям и пешеходам.
Но если, к примеру, и регулировщика противоречат друг другу, следовать нужно последним. Поэтому необходимо знать и понимать жесты сотрудника ГИБДД всем автолюбителям и пешеходам.
Если регулировщик вытягивает обе руки вперед, в стороны или опускает по швам:
- слева и справа от него трамвай имеет право ехать прямо; безрельсовые транспортные средства — прямо и направо; пешеходы могут спокойно переходить дорогу;
- те, кто находится спереди и сзади, обязаны стоять на месте.
Если регулировщик вытягивает правую руку вперед:
- слева движение разрешено трамваю только налево, а остальным транспортным средствам — в любом направлении;
- автомобили и другие ТС, находящиеся со стороны груди полицейского, имеют право продолжить движение только направо;
- справа и сзади все должны остановиться.
Если регулировщик поднимает руку вверх (этот жест эквивалентен желтому сигналу светофора), то в этом случае и пешеходы, и транспортные средства не могут продолжить движение.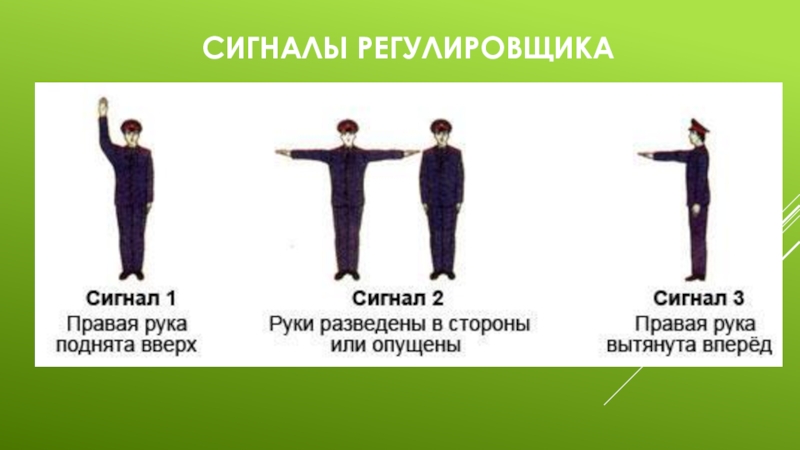 Это правило не касается тех водителей, которые в это время могут остановиться, только если используют экстренное торможение. Им разрешено завершить маневр и продолжить движение. Также пешеходы, во время сигнала переходившие проезжую часть, должны дойти до безопасного места либо, если это невозможно, встать на линию разметки, разделяющую транспортные потоки.
Это правило не касается тех водителей, которые в это время могут остановиться, только если используют экстренное торможение. Им разрешено завершить маневр и продолжить движение. Также пешеходы, во время сигнала переходившие проезжую часть, должны дойти до безопасного места либо, если это невозможно, встать на линию разметки, разделяющую транспортные потоки.
В условиях плохой видимости сигналы регулировщика подаются при помощи жезла или красного световозвращателя. Также может быть использован громкоговоритель. Для привлечения внимания пешеходов и водителей сотрудники ГИБДД часто используют свисток.
Сигналы регулировщика ПДД не нужно зубрить как стихотворение, их нужно просто понять и запомнить.
При сигнале, запрещающем проезд, водители должны остановиться:
а) у стоп-линии;
б) на перекрестках — перед пересекаемой дорогой;
в) перед ж/д переездом;
г) перед регулировщиком или светофором, не мешая пешеходам и движение которым разрешено.
Проще всего сигналы регулировщика запомнить так: когда они разрешают двигаться, то ехать можно «из рукава в рукав». Это значит, что по направлению рук имеют право ехать трамваи, а остальные автомобили еще и направо.
Это значит, что по направлению рук имеют право ехать трамваи, а остальные автомобили еще и направо.
Очень важным способом регулирования дорожного движения является светофор.
Его сигналы могут быть Х-образными, круглыми, в виде стрелочки, указывающей направление, в виде силуэта пешехода. Подаются они цветами — зеленым, желтым и красным.
Рассмотрим некоторые самые важные круглыесигналы светофора:
- сигнал зеленого цвета разрешает движение;
- мигающий зеленый сигнал — время, когда можно ехать или идти, заканчивается. Зачастую на светофорах также горит табло с секундами, оставшимся до его окончания;
- сигнал желтого цвета запрещает движение и говорит о скорой смене команды;
- мигающий желтый сигнал разрешает двигаться, предупреждает о наличии или ;
- красный цвет, в том числе и мигающий, запрещает движение.
Сигнал светофора в виде стрелочки показывает, в какую сторону разрешено или в данный момент. Если можно ехать налево, то допускается и разворот, но только в том случае, если это не противоречит дорожному знаку или линии разметки.
Не только водителям, но и пешеходам и велосипедистам стоит знать жесты регулировщика, прописанные в ПДД, ведь каждый из нас может попасть в ситуацию, когда движение на дороге регулирует не светофор, а сотрудник .
Основные жесты регулировщика
Для начала давайте поговорим об основных сигналах, запомнить которые очень просто.
- Итак, если сотрудник ГИБДД поднял руку вверх, это означает, что движение запрещено абсолютно всем участникам, и пешеходам, и водителям. При этом не важно, как именно стоит регулировщик, спиной к вам или боком. Другие обозначения жестов регулировщика будут уже зависеть от положения корпуса сотрудника полиции.
- В том случае, когда у регулировщика вытянуты руки в сторону или опущены, а сам сотрудник полиции стоит к вам спиной или грудью, движение запрещено, но при таком же положении рук с изменением положения корпуса, то есть регулировщик стоит к вам боком, вы можете двигаться вперед или направо.
- Если правая рука сотрудника полиции вытянута, и он стоит к вам спиной или правым боком, то двигаться нельзя, ну а если он повернулся к вам левым боком, вы можете ехать абсолютно в любом направлении. В случае, когда этот жест рукой дополняется тем, что регулировщик повернулся к вам грудью, можно поворачивать направо. Кстати, этот жест регулировщика правой рукой для пешеходов означает, что они могут переходить проезжую часть, если сотрудник ГИБДД повернулся к ним спиной.
 В случае, когда этот жест рукой дополняется тем, что регулировщик повернулся к вам грудью, можно поворачивать направо. Кстати, этот жест регулировщика правой рукой для пешеходов означает, что они могут переходить проезжую часть, если сотрудник ГИБДД повернулся к ним спиной.
В случае, когда этот жест рукой дополняется тем, что регулировщик повернулся к вам грудью, можно поворачивать направо. Кстати, этот жест регулировщика правой рукой для пешеходов означает, что они могут переходить проезжую часть, если сотрудник ГИБДД повернулся к ним спиной.Как видите, сигналов и жестов у регулировщика ГИБДД не так-то и много, но все же, многие люди просто не могут запомнить их. Но, соблюдая несколько правил, человек сможет быстро запомнить все обозначения и не растеряться на дороге.
Как легко запомнить жесты регулировщика?
Постарайтесь для начала запомнить несколько правил. Во-первых, сотрудник ГИБДД всегда будет разрешать движение только в двух направлениях одновременно, при этом он всегда будет руками обозначать стороны, которые именно сейчас участвуют в процессе.
Во-вторых, если сотрудник полиции повернулся к вам спиной, это сравнимо с красным сигналом светофора, исключение лишь тот случай, когда пешеход видит спину регулировщика, правая рука которого вытянута вперед.
Это основные правила, которые помогут не растеряться на дороге, но все же, особенно водителям, лучше больше времени уделить изучению всех жестов, только тогда возникнет привычка, и вы сможете легко управлять .
Как запомнить жесты регулировщика, изучая правила?
Первое, что следует сделать, это приобрести правила дорожного движения, где есть картинки, показывающие все жесты сотрудника полиции. Замечательно, если кроме рисунков там будут и подробные описания. После этого, несколько раз прочтите каждое правило, сделайте перерыв и постарайтесь повторить их, не заглядывая в книгу. Если сигналы не зафиксировались в памяти с первого раза, повторите всю процедуру.
Далее попросите родственника или друга имитировать жесты сотрудника полиции, а сами говорите, какими будут ваши действия при том или ином сигнале. Такая игра поможет натренироваться и достичь автоматизма. Повторите подобную имитацию несколько раз, попросите друга проверять правильность ваших ответов и исправлять в случае ошибки.
Не менее эффективно использовать и задания, которые помогают оценить уровень знаний правил дорожного движения, их можно найти в том же книжном магазине. Решая задачки, вы будете увереннее чувствовать себя на дороге, сможете запомнить все основные сигналы, а также узнаете, какие из правил вам стоит повторить еще раз. Не ленитесь, и потратьте несколько часов на подобное занятие, это убережет вас от возможных неприятностей.
Также можно легко и быстро запомнить основные жесты регулировщика используя такие стихи:
В настоящее время регулировщики на дорогах встречаются довольно редко. Именно подобная редкость и является причиной того, что большинство водителей забывают, что означают многие жесты авторегулировщика. Таким образом, на сегодняшний день очень актуальным является вопрос запоминания этих самых действий, ведь лучше немного напрячь память, нежели попасть в опасную и неприятную ситуацию, которая может закончиться аварией .
Почему жесты на дороге так важны?
Регулировщика с полной уверенностью можно назвать «живым» светофором, условные знаки которого необходимо понимать и выполнять всем участникам движения на перекрёстке! Точно, точно, этот человек сигнализирует не только водителям, но и пешеходам. В зависимости от положения его рук и корпуса либо разрешается, либо запрещается передвигаться в том или ином направлении.
В зависимости от положения его рук и корпуса либо разрешается, либо запрещается передвигаться в том или ином направлении.
Неотъемлемым атрибутом работы такого специалиста является жезл или диск со светоотражателем или красным сигналом, которые необходимы для улучшения видимости. С их помощью он подаёт запрещающие или разрешающие условные знаки. Вне зависимости от того, есть в руках авторегулировщика жезл или он отсутствует, вы обязаны выполнять его сигналы!
Жесты регулировщика ПДД могут сопровождаться дополнительным свистом. Это акцентирует внимание любого участвующего в дорожном движении человека на смене его положения.
Наиболее важные моменты
Несмотря на то что каждый будущий водитель изучает свод правил, касающихся действий на регулируемом человеком перекрёстке, многие сдают экзамен и благополучно . Итак, освежим в памяти то, что вы уже наверняка знаете.
Существует вереница общих правил, которая даст возможность вам легко и быстро вспомнить все условные знаки того, кто регулирует дорожное движение:
- он может разрешить передвижение автомобилей только с двух сторон регулируемого перекрёстка;
- вытянутая рука человека с жезлом всегда указывает на направление, вдоль которого можно двигаться;
- его спина приравнивается к красному свету на светофоре;
- трамвай может следовать только вдоль рук регулировщика, в то время как автомобиль может ещё сворачивать направо.

Ещё один важный момент — если человек с жезлом начал менять положение корпуса и рук, то водитель должен завершить манёвр, это не будет рассмотрено как нарушение правил дорожного движения.
Также стоит знать, что сигналы человека-регулировщика имеют , нежели светофоры и дорожные знаки. Это ещё один из поводов хорошенько задуматься над важностью этой персоны на дороге.
Видео о видах сигналов регулировщика:
Главные сигналы и их расшифровка
На самом деле, схема жестов авторегулировщика достаточно проста, стоит всего лишь сравнить их с сигналами светофора и сразу всё станет ясно. Чтобы понять, как запомнить все положения человека с жезлом, стоит лишь включить логику и желание.
Поднятие руки вверх
Как понять, почему при поднятии «управляющим перекрёстком» руки вверх запрещается двигаться и пешеходам, и автомобилям в любом направлении? Очень просто, вспомните про жёлтый свет светофора и его значение.
Сигнал поднятой руки очищает перекрёсток от всех участвующих в дорожном движении , поэтому совершенно неважно, какой стороной к вам стоит тот, кто регулирует. Всё просто — движение запрещено!
Всё просто — движение запрещено!
Очень часто такой жест применяют для возможности дать дорогу спецтранспорту, который пересекает перекрёсток.
Разведённые или опущенные руки
Разведённые в стороны и опущенные руки обозначают одно и то же . Зачем такие сложности? Бывают ситуации, когда через перекрёсток проходит крупногабаритный транспорт или же перекрёсток сам по себе достаточно узкий, тогда регулирующий движение не может развести руки в стороны, так как будет препятствовать нормальному передвижению автомобилей.
Этот условный знак приравнивают к красному свету светофора . Вы не можете двигаться дальше, если находитесь перед грудью или спиной авторегулировщика с опущенными или разведёнными руками.
В случае когда специалист-регулировщик в одном из таких положений находится к вам боком, вы можете двигаться прямо или направо. Это положение человека с жезлом приравнивают к значению зелёного света . Он может находиться к вам правым или левым боком, это не влияет на значения жеста.
Вытянута вперёд правая рука
В случае когда «хозяин жезла» повернулся к вам лицом и вытянул правую руку вперёд, вы смело можете поворачивать направо. Этот жест полностью соответствует зелёной стрелке светофора, которая указывает вправо. В других направлениях движение запрещено!
Если вы находитесь за спиной или справа от него в таком положении, то вам стоит ожидать своего разрешения на движение.
Водители автомобилей, что находятся слева от регулировщика, могут двигаться в любом направлении.
Если вы относитесь к пешеходам, то повёрнутый спиной к вам регулировщик — это говорит о разрешении переходить дорогу.
Итак, не стоит бояться «управляющих перекрёстками». Мы подсказали вам, как понять и изучить их действия. На практике вы увидите, что это очень легко и просто читать жесты авторегулировщика.
Регулировщик — это не грозный дядька, который налево и направо хаотично размахивает руками и всё время ворочается, это человек, что облегчает и помогает вам пересечь тяжёлый перекрёсток.
Зачем нужны сигналы регулировщика. | Учись легко, води с удовольствием
Регулировщики как тигры — все знают, что они существуют, но встречаются достаточно редко. Кроме того, при встрече, мы пугаемся и стремимся избежать контакта с ними. А ведь причина страха в том, что мы забыли чему нас учили в автошколе.
Большинство пешеходов не знакомы даже с элементарными жестами регулировщика. Несмотря на то, что классические гаишники встречаются чаще классических регулировщиков, его сигналам продолжают обучать в каждой автошколе.
Знание сигналов регулировщика является обязательным для получения водительского удостоверения. Для того, чтобы сдать на права, приходится эти сигналы заучивать.
На перекрестках встречаются ситуации, когда электроника (светофоры и датчики направления) не могут справиться. Тогда разобраться в ситуации должен лишь живой человек.
Так кто же такой регулировщик? Регулировщик является человеком в форме, в руках которого находится жезл со встроенным светоотражателем либо красным сигналом. Однако это не обязательные атрибуты. Их предназначение увеличивать видимость подаваемых сигналов.
Однако это не обязательные атрибуты. Их предназначение увеличивать видимость подаваемых сигналов.
Согласно правил дорожного движения, регулировщик может подавать сигналы исключительно посредством рук. Игнорировать такие сигналы запрещено.
Очень важно помнить, что когда орудует регулировщик, сигналы светофора и дорожные знаки являются менее приоритетными и отходят на второй план, поскольку своими жестами регулировщик в праве отменить их значение. Да, регулировщик крут!
В автошколе учат следующим сигналам регулировщика:
Рука поднята вверх. Данный сигнал запрещает двигаться пешеходу и транспорту. Благодаря этому сигналу перекресток освобождается всеми участниками дорожного движения и через него может без проблем проехать, например, спецтранспорт.
Руки разведены в стороны или опущены. Здесь руки регулировщика уместнее сравнить со шлагбаумами. Он как бы перегораживает Вам дорогу. Соответственно движение запрещено, если вы стоите либо прямо перед ним либо за его спиной. Если регулировщик с разведенными в стороны руками (или опущенными вдоль тела) повёрнут к вам боком — вам разрешено двигаться либо прямо, либо направо.
Вперед вытянута правая рука. Если регулировщик стоит к вам лицом и направляет на вас регулировочный инструмент — вам разрешено движение вправо, другие направления для вас запрещены (вы не можете ехать прямо, вы не можете ехать влево). Транспортные средства за спиной регулировщика должны оставаться на месте, дожидаться своей очереди. Транспортные средства справа от него точно также должны запастись терпением и оставаться там, где и были. Водители, расположенные от регулировщика слева, имеют полную свободу и могут двигаться во всех направлениях.
%PDF-1.6
%
220 0 объект
>/OCGs[230 0 R]>>/OpenAction 221 0 R/PageLayout/SinglePage/Pages 209 0 R/Тип/Каталог>>
эндообъект
229 0 объект
>/Шрифт>>>/Поля 234 0 R>>
эндообъект
217 0 объект
>поток
2010-11-18T17:01:35-05:002010-04-01T20:37:46-04:002010-11-18T17:01:35-05:00Adobe Acrobat 9. 3.1application/pdfuuid:5c3476c2-d244-4cda- 9813-83e1394fbaf8uuid:886d9213-e65b-4127-949c-fa7a67a9d371Adobe Acrobat 9.31 Подключаемый модуль захвата бумаги конечный поток
эндообъект
221 0 объект
>
эндообъект
209 0 объект
>
эндообъект
210 0 объект
>
эндообъект
211 0 объект
>
эндообъект
212 0 объект
>
эндообъект
213 0 объект
>
эндообъект
214 0 объект
>
эндообъект
215 0 объект
>
эндообъект
216 0 объект
>
эндообъект
103 0 объект
>/ProcSet[/PDF/Text/ImageB]/XObject>>>/Повернуть 0/Тип/Страница>>
эндообъект
107 0 объект
>/ProcSet[/PDF/Text/ImageB]/XObject>>>/Повернуть 0/Тип/Страница>>
эндообъект
111 0 объект
>/ProcSet[/PDF/Text/ImageB]/XObject>>>/Повернуть 0/Тип/Страница>>
эндообъект
115 0 объект
>/ProcSet[/PDF/Text/ImageB]/XObject>>>/Повернуть 0/Тип/Страница>>
эндообъект
119 0 объект
>>>/Повернуть 0/Тип/Страница>>
эндообъект
122 0 объект
>>>/Повернуть 0/Тип/Страница>>
эндообъект
123 0 объект
>поток
HMN1Y^»R$fDŢ@ѢV =Rؔd$GI#ͨr*sa3`GbYx9!ZfHm$ 5GFŅ̛> —
YG|?}`X=E?’CPOZ%qdUDim?LqǟG\G͇%,9~gHOiʍi’ƢByͬ3o
3.1application/pdfuuid:5c3476c2-d244-4cda- 9813-83e1394fbaf8uuid:886d9213-e65b-4127-949c-fa7a67a9d371Adobe Acrobat 9.31 Подключаемый модуль захвата бумаги конечный поток
эндообъект
221 0 объект
>
эндообъект
209 0 объект
>
эндообъект
210 0 объект
>
эндообъект
211 0 объект
>
эндообъект
212 0 объект
>
эндообъект
213 0 объект
>
эндообъект
214 0 объект
>
эндообъект
215 0 объект
>
эндообъект
216 0 объект
>
эндообъект
103 0 объект
>/ProcSet[/PDF/Text/ImageB]/XObject>>>/Повернуть 0/Тип/Страница>>
эндообъект
107 0 объект
>/ProcSet[/PDF/Text/ImageB]/XObject>>>/Повернуть 0/Тип/Страница>>
эндообъект
111 0 объект
>/ProcSet[/PDF/Text/ImageB]/XObject>>>/Повернуть 0/Тип/Страница>>
эндообъект
115 0 объект
>/ProcSet[/PDF/Text/ImageB]/XObject>>>/Повернуть 0/Тип/Страница>>
эндообъект
119 0 объект
>>>/Повернуть 0/Тип/Страница>>
эндообъект
122 0 объект
>>>/Повернуть 0/Тип/Страница>>
эндообъект
123 0 объект
>поток
HMN1Y^»R$fDŢ@ѢV =Rؔd$GI#ͨr*sa3`GbYx9!ZfHm$ 5GFŅ̛> —
YG|?}`X=E?’CPOZ%qdUDim?LqǟG\G͇%,9~gHOiʍi’ƢByͬ3o
Автопилот и возможность полного автономного вождения
Autopilot — это усовершенствованная система помощи водителю, повышающая безопасность и удобство управления автомобилем. При правильном использовании автопилот снижает общую нагрузку на водителя. Каждый новый автомобиль Tesla оснащен 8 внешними камерами, 12 ультразвуковыми датчиками и мощным бортовым компьютером, обеспечивающим дополнительный уровень безопасности, который поможет вам в путешествии. Model 3 и Model Y, созданные для рынка Северной Америки, перешли на Tesla Vision с камерами, которые не оснащены радаром и вместо этого полагаются на расширенный набор камер Tesla и обработку нейронной сети для обеспечения автопилота и связанных с ним функций.Model S и Model X продолжают оснащаться радаром.
При правильном использовании автопилот снижает общую нагрузку на водителя. Каждый новый автомобиль Tesla оснащен 8 внешними камерами, 12 ультразвуковыми датчиками и мощным бортовым компьютером, обеспечивающим дополнительный уровень безопасности, который поможет вам в путешествии. Model 3 и Model Y, созданные для рынка Северной Америки, перешли на Tesla Vision с камерами, которые не оснащены радаром и вместо этого полагаются на расширенный набор камер Tesla и обработку нейронной сети для обеспечения автопилота и связанных с ним функций.Model S и Model X продолжают оснащаться радаром.
Автопилот входит в стандартную комплектацию каждой новой Tesla. Для владельцев, которые получили свои автомобили без автопилота, доступны два пакета для покупки, в зависимости от того, когда ваш автомобиль был построен: автопилот и возможность полного автономного вождения.
Автопилот и возможность полного самостоятельного вождения предназначены для использования с полностью внимательным водителем, который держит руки на руле и готов взять на себя управление в любой момент. Хотя эти функции предназначены для того, чтобы со временем стать более функциональными, функции, включенные в настоящее время, не делают автомобиль автономным.
Хотя эти функции предназначены для того, чтобы со временем стать более функциональными, функции, включенные в настоящее время, не делают автомобиль автономным.
Функции автопилота и полного автономного вождения
Автопилот — это набор функций помощи водителю, которые входят в стандартную комплектацию при покупке нового автомобиля или могут быть приобретены после доставки, и добавляет новые функции в ваш Tesla, делая вождение более безопасным и менее напряженным.Доступные пакеты включают:
Автопилот
- Круиз-контроль с учетом трафика : Сопоставляет скорость вашего автомобиля со скоростью окружающего движения
- Autosteer : Помогает управлять автомобилем в пределах четко обозначенной полосы и использует круиз-контроль с учетом дорожного движения
Возможность полного автономного вождения
- Навигация на автопилоте (бета-версия) : Активно направляет ваш автомобиль от въезда на съезд к съезду, включая предложение смены полосы движения, навигацию по развязкам, автоматическое включение указателя поворота и выбор правильного выезда
- Auto Lane Change : Помогает перестроиться на соседнюю полосу на шоссе, когда включено автоматическое управление
- Autopark : помогает автоматически припарковать автомобиль параллельно или перпендикулярно одним касанием
- Summon : перемещает ваш автомобиль в ограниченном пространстве и из него с помощью мобильного приложения или ключа .
- Smart Summon : Ваш автомобиль будет перемещаться по более сложной среде и парковочным местам, маневрируя вокруг объектов по мере необходимости, чтобы найти вас на стоянке.
- Управление дорожным движением и знаками остановки (бета-версия) : определяет знаки остановки и светофоры и автоматически замедляет автомобиль до остановки при приближении под вашим активным контролем
- Предстоящие :
- Автоматическое управление на городских улицах

Доступные в настоящее время функции автопилота и полного автономного вождения требуют активного контроля со стороны водителя и не делают автомобиль автономным. Полная автономия будет зависеть от достижения надежности, значительно превышающей надежность водителей-людей, о чем свидетельствуют миллиарды миль опыта, а также одобрение регулирующих органов, что может занять больше времени в некоторых юрисдикциях.По мере развития возможностей автопилота и полного автономного вождения Tesla ваш автомобиль будет постоянно обновляться с помощью беспроводных обновлений программного обеспечения.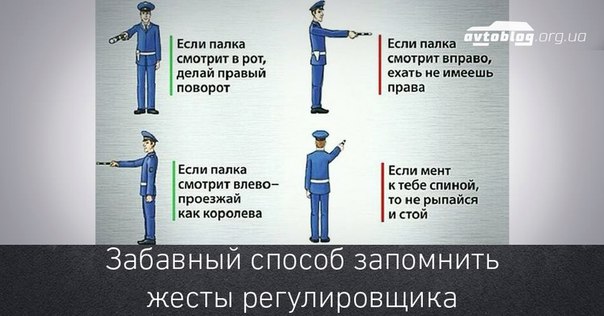
Использование автопилота и возможности полного самостоятельного вождения
Перед использованием автопилота прочтите руководство пользователя, чтобы получить инструкции и дополнительную информацию по технике безопасности. При использовании автопилота вы обязаны сохранять бдительность, постоянно держать руки на руле и сохранять контроль над автомобилем. Многие из наших функций автопилота, такие как автоуправление, навигация на автопилоте и вызов, по умолчанию отключены.Чтобы включить их, вы должны перейти в меню «Управление автопилотом» на вкладке «Настройки» и включить их.
Прежде чем включить автопилот, водитель сначала должен согласиться «всегда держать руки на руле» и всегда «сохранять контроль и ответственность за свое транспортное средство». Впоследствии каждый раз, когда водитель включает автопилот, ему показывается визуальное напоминание «держать руки на руле».
Круиз-контроль с учетом трафика
Чтобы включить круиз-контроль с учетом трафика в моделях S и X, потяните один раз рычаг круиз-контроля слева от рулевой колонки. В модели 3 и модели Y один раз потяните вниз рычаг переключения передач справа от рулевой колонки.
В модели 3 и модели Y один раз потяните вниз рычаг переключения передач справа от рулевой колонки.
Autosteer
Чтобы включить Autosteer в Model S и Model X, дважды потяните на себя рычаг круиз-контроля слева от рулевой колонки. В модели 3 и модели Y дважды потяните вниз рычаг переключения передач справа от рулевой колонки. Серый значок рулевого колеса появится на вашем дисплее рядом со спидометром, когда система будет доступна для включения.Синий значок рулевого колеса появится на вашем дисплее рядом со спидометром, когда Autosteer включен.
Когда Autosteer используется, он измеряет величину крутящего момента, прилагаемого к рулевому колесу, и, если крутящий момент оказывается недостаточным, серия звуковых и визуальных предупреждений снова напоминает вам о необходимости положить руки на руль. Это помогает вам быть внимательным и тренирует хорошие привычки вождения. Если вы неоднократно будете игнорировать эти предупреждения, вы не сможете использовать автопилот на время этой поездки.
Навигация на автопилоте
Навигация на автопилоте предназначена для более эффективной доставки вас к месту назначения за счет активного направления вашего автомобиля от въезда к съезду, включая предложение и внесение изменений в полосу движения, навигацию по развязкам на шоссе и выбор съездов. Он разработан, чтобы еще проще находить и следовать по наиболее эффективному маршруту к месту назначения на шоссе, когда используется автопилот.
Чтобы задействовать эту функцию, необходимо сначала включить автопилот, выбрав «Управление» > «Автопилот» > «Автопилот», а затем включить функцию «Навигация на автопилоте».Потребуется калибровка камеры и загрузка последней версии навигационных карт через Wi-Fi.
Для каждого маршрута, где доступна навигация на автопилоте, у вас будет возможность активировать ее, нажав кнопку НАВИГАЦИЯ НА АВТОПИЛОТЕ, расположенную в списке поворотов навигации. Вы также можете активировать навигацию на автопилоте автоматически каждый раз, когда введен пункт назначения и включен автопилот, изменив настройки навигации на автопилоте в разделе «Управление» > «Автопилот» > «Настроить навигацию на автопилоте».
На моделях 3 и Y навигация на автопилоте может быть включена на большинстве автомагистралей путем быстрого перемещения рычага переключения передач дважды вниз.
На моделях S и X функцию «Навигация на автопилоте» можно активировать на большинстве автомагистралей, потянув переключатель круиз-контроля на себя два раза подряд.
Автоматическая смена полосы движения
Чтобы инициировать автоматическую смену полосы движения, необходимо сначала включить автоматическую смену полосы движения в меню «Управление автопилотом» на вкладке «Настройки».Затем, когда автомобиль находится в режиме автоматического управления, водитель должен включить сигнал поворота в том направлении, в котором он хотел бы двигаться. На некоторых рынках, в зависимости от местного законодательства, подтверждение смены полосы движения можно отключить, выбрав «Управление» > «Автопилот» > «Настроить навигацию на автопилоте» и отключив «Подтверждение смены полосы движения».
Autopark
Если ваш автомобиль увидит место для парковки, слева или справа на приборной панели появится серый значок «P», в зависимости от расположения места. Autopark определяет места параллельной парковки при движении со скоростью менее 25 км/ч и перпендикулярные места парковки при движении со скоростью менее 10 миль в час.
Autopark определяет места параллельной парковки при движении со скоростью менее 25 км/ч и перпендикулярные места парковки при движении со скоростью менее 10 миль в час.
Чтобы использовать Autopark в это время, нажмите на тормоз и переведите селектор передач в положение «Задний ход». Держите ногу на тормозе. На сенсорном экране синим текстом появится надпись «Начать автопарковку». Нажмите ее, чтобы запустить функцию и отпустить тормоз и рулевое колесо. Затем Autopark начнет маневрировать автомобилем на парковочном месте, контролируя скорость вашего автомобиля, переключение передач и угол поворота рулевого колеса, но вы должны помнить о том, чтобы быть начеку и следить за обзором резервной камеры, чтобы проверить наличие препятствий.
После завершения автопарковки машина сообщит вам об этом и переключится в режим «Парковка». Вы можете отменить автопарковку в любое время, взяв на себя управление рулевым колесом.
Призыв
Чтобы использовать Призыв, откройте приложение Tesla. Нажмите «Вызов», а затем нажмите кнопки «вперед» или «назад». Владельцы Model S и Model X могут использовать Summon с помощью своего брелока, удерживая центр брелока в течение трех секунд, пока не загорятся аварийные огни автомобиля, а затем нажав кнопку frunk или Trunk на брелоке для Summon вперед и назад соответственно. .Summon также интегрируется с HomeLink и открывает дверь гаража, чтобы вытащить машину из гаража.
Нажмите «Вызов», а затем нажмите кнопки «вперед» или «назад». Владельцы Model S и Model X могут использовать Summon с помощью своего брелока, удерживая центр брелока в течение трех секунд, пока не загорятся аварийные огни автомобиля, а затем нажав кнопку frunk или Trunk на брелоке для Summon вперед и назад соответственно. .Summon также интегрируется с HomeLink и открывает дверь гаража, чтобы вытащить машину из гаража.
Smart Summon
Smart Summon позволяет вашему автомобилю подъезжать к вам или в выбранное вами место, маневрируя вокруг и останавливаясь для объектов по мере необходимости. Как и Summon, Smart Summon предназначен только для использования на частных парковках и подъездных путях. Вы по-прежнему несете ответственность за свой автомобиль и должны постоянно следить за ним и его окружением и находиться в пределах прямой видимости, поскольку он может не обнаруживать все препятствия.Будьте особенно осторожны рядом с быстро движущимися людьми, велосипедами и автомобилями.
Чтобы использовать Smart Summon, откройте приложение Tesla, нажмите Summon, а затем выберите значок Smart Summon. Чтобы активировать эту функцию, нажмите и удерживайте кнопку ПРИХОДИТЕ КО МНЕ. Либо коснитесь значка цели, установите желаемую цель, настроив карту, а затем нажмите и удерживайте кнопку ПЕРЕЙТИ К ЦЕЛИ. Вы можете остановить свой автомобиль от движения в любое время, отпустив кнопку.
Smart Summon работает с вашим приложением Tesla и GPS вашего телефона.Вы должны быть в пределах примерно 200 футов от вашего автомобиля, чтобы использовать. Для Smart Summon требуется последняя версия мобильного приложения Tesla (3.10.0 или выше). Дополнительные сведения об этой функции см. в руководстве пользователя.
Управление светофором и стоп-сигналом (бета)
 vimeo.com/video/412387973?color=cc0000&title=0&byline=0&portrait=0″ allow=»autoplay; fullscreen» webkitallowfullscreen=»»/>
vimeo.com/video/412387973?color=cc0000&title=0&byline=0&portrait=0″ allow=»autoplay; fullscreen» webkitallowfullscreen=»»/>
Управление светофорами и знаками «стоп» (бета-версия) распознает знаки «стоп» и светофоры и автоматически замедляет ваш автомобиль до остановки при приближении с использованием автопилота под вашим активным контролем.Чтобы включить, переведите автомобиль в режим ПАРКОВКА и коснитесь «Управление» > «Автопилот» > «Светофор и контроль стоп-сигнала (бета-версия)», затем включите круиз-контроль с учетом трафика или автоматическое рулевое управление.
Когда включено управление светофором и знаком «стоп» (бета), визуализация вождения отображает приближающиеся светофоры, знаки «стоп» или дорожную разметку на перекрестках, где вашему автомобилю может потребоваться остановиться. Когда вы приближаетесь к перекрестку, даже если горит зеленый свет светофора, ваш автомобиль будет отображать красную линию, указывающую, где автомобиль остановится, и начнет замедляться. Чтобы продолжить движение через стоп-линию, потяните подрулевой переключатель автопилота или коротко нажмите на педаль акселератора, чтобы убедиться, что движение безопасно. В это время система контроля светофора и стоп-сигнала не поворачивает автомобиль, независимо от того, находитесь ли вы в поворотной полосе или у вас включены поворотники.
Чтобы продолжить движение через стоп-линию, потяните подрулевой переключатель автопилота или коротко нажмите на педаль акселератора, чтобы убедиться, что движение безопасно. В это время система контроля светофора и стоп-сигнала не поворачивает автомобиль, независимо от того, находитесь ли вы в поворотной полосе или у вас включены поворотники.
В уведомлениях на сенсорном экране указывается причина остановки (знак остановки или светофор), а также приблизительное расстояние до остановки вашего автомобиля. Если в уведомлении о светофоре не указан цвет света, значит, ваш автомобиль не подтвердил состояние управления дорожным движением.
Как и во всех функциях автопилота, вы должны контролировать свое транспортное средство, обращать внимание на его окружение и быть готовым к немедленным действиям, включая торможение. Эта функция находится в стадии бета-тестирования и может не работать для всех элементов управления трафиком. Пока включено управление движением и знаками остановки на наземных улицах с включенным автоматическим рулевым управлением, ваша скорость будет ограничена указанным пределом.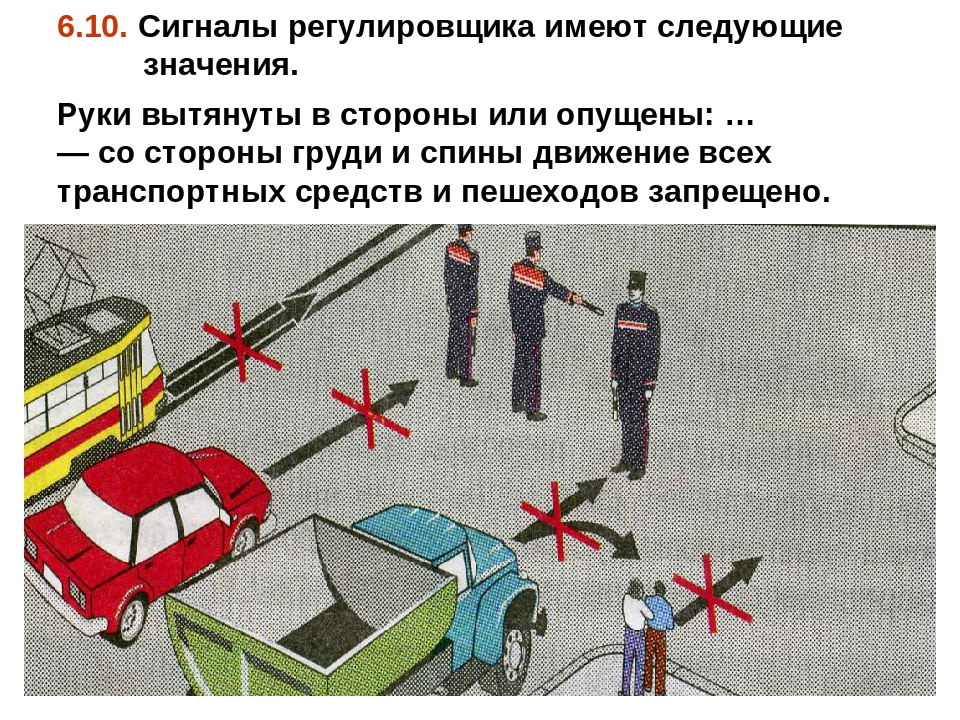 Пожалуйста, ознакомьтесь с руководством пользователя для получения дополнительной информации, инструкций по использованию и предупреждений.
Пожалуйста, ознакомьтесь с руководством пользователя для получения дополнительной информации, инструкций по использованию и предупреждений.
Функции активной безопасности
Активные функции безопасности входят в стандартную комплектацию всех автомобилей Tesla, выпущенных после сентября 2014 года, для постоянной повышенной защиты.Эти функции стали возможными благодаря нашей аппаратно-программной системе Autopilot и включают в себя:
- Автоматическое экстренное торможение : Обнаруживает автомобили или препятствия, с которыми может столкнуться автомобиль, и соответственно применяет тормоза
- Предупреждение о прямом столкновении : Предупреждает о надвигающемся столкновении с медленно движущимися или неподвижными автомобилями
- Предупреждение о боковом столкновении : Предупреждает о возможных столкновениях с препятствиями рядом с автомобилем
- Ускорение с учетом препятствий : автоматически снижает ускорение при обнаружении препятствия перед автомобилем при движении на низкой скорости
- Мониторинг слепых зон : Предупреждает при обнаружении автомобиля или препятствия при смене полосы движения
- Предотвращение выезда с полосы движения : Применяет корректирующее рулевое управление, чтобы удерживать автомобиль на намеченной полосе
- Предотвращение выезда с полосы движения : Направляет ваш автомобиль обратно на полосу движения, когда обнаруживает, что ваш автомобиль покидает полосу движения и может произойти столкновение
Активные функции безопасности предназначены для помощи водителям, но не могут реагировать в любой ситуации. Вы несете ответственность за то, чтобы сохранять бдительность, вести безопасное вождение и постоянно контролировать свой автомобиль.
Вы несете ответственность за то, чтобы сохранять бдительность, вести безопасное вождение и постоянно контролировать свой автомобиль.
Часто задаваемые вопросы
Все ли автомобили имеют автопилот?
Нет. Автопилот доступен только на автомобилях, выпущенных после сентября 2014 г., и его функциональные возможности со временем изменились за счет добавления нового оборудования и более мощной обработки. Для автомобилей без программного обеспечения автопилота, но оснащенных необходимым оборудованием, вы можете приобрести автопилот или полную возможность самостоятельного вождения в любое время через свою учетную запись Tesla, и необходимое программное обеспечение автопилота будет добавлено к вашему автомобилю.
Могу ли я попробовать автопилот перед покупкой?
Вы можете испытать автопилот или полную возможность самостоятельного вождения на тест-драйве в одном из наших магазинов Tesla.
Как приобрести обновление для автопилота?
Вы можете приобрести автопилот или полную возможность самостоятельного вождения в любое время через свою учетную запись Tesla, и необходимое программное обеспечение для автопилота будет добавлено к вашему автомобилю.
Можно ли оснастить автомобиль автопилотом?
Все автомобили, выпущенные с октября 2016 года, в стандартной комплектации оснащены автопилотом.
Автомобили, выпущенные в период с сентября 2014 г. по октябрь 2016 г., оснащены одной камерой, а также радаром и ультразвуковыми датчиками первого поколения. Для этих автомобилей мы не предлагаем модернизацию новейшего оборудования Autopilot.
Как проверить, какое у меня оборудование для автопилота?
Проверьте конфигурацию на сенсорном экране. Выберите «Элементы управления» > «Программное обеспечение» и подтвердите тип компьютера «Автопилот». Затем нажмите «Дополнительная информация об автомобиле».
Как работает автопилот?
Созданный на основе глубокой нейронной сети, Autopilot* использует камеры и ультразвуковые датчики, чтобы видеть и ощущать окружающую среду вокруг автомобиля.Этот надежный набор датчиков и камер дает водителям информацию об окружающем пространстве, чего в противном случае не было бы у водителя в одиночку. Мощный бортовой компьютер обрабатывает эти входные данные за миллисекунды, чтобы сделать ваше вождение более безопасным и менее напряженным.
Мощный бортовой компьютер обрабатывает эти входные данные за миллисекунды, чтобы сделать ваше вождение более безопасным и менее напряженным.
*Модель 3 и модель Y, предназначенные для рынка Северной Америки, используют Tesla Vision на базе камеры и не оснащены радаром. Model S и Model X используют все перечисленное выше оборудование и по-прежнему оснащены радаром.
Нужно ли мне быть внимательным при использовании автопилота?
Да.Автопилот — это практическая система помощи водителю, которая предназначена для использования только полностью внимательным водителем. Это не превращает Tesla в самоуправляемый автомобиль и не делает автомобиль автономным.
Перед включением автопилота вы должны согласиться «всегда держать руки на руле» и всегда «сохранять контроль и ответственность за свой автомобиль». После включения автопилот также выдает нарастающую серию визуальных и звуковых предупреждений, напоминая вам о том, что нужно положить руки на руль, если приложен недостаточный крутящий момент. Если вы неоднократно будете игнорировать эти предупреждения, вы не сможете использовать автопилот во время этой поездки.
Если вы неоднократно будете игнорировать эти предупреждения, вы не сможете использовать автопилот во время этой поездки.
Вы можете отключить любую функцию автопилота в любое время, управляя рулем, тормозя или отключая круиз-контроль.
Каковы ограничения автопилота?
Многие факторы могут повлиять на работу автопилота, в результате чего система не сможет функционировать должным образом. К ним относятся, но не ограничиваются: плохая видимость (из-за сильного дождя, снега, тумана и т.), яркий свет (из-за встречных фар, прямого солнечного света и т. д.), грязь, лед, снег, помехи или препятствия из-за предметов, установленных на транспортном средстве (например, крепления для велосипедов), препятствия, вызванные нанесением чрезмерного количества краски или клея ( например, обертки, наклейки, резиновое покрытие и т. д.) на транспортное средство; узкие, криволинейные или извилистые дороги, поврежденный или смещенный бампер, помехи от другого оборудования, генерирующего ультразвуковые волны, чрезвычайно высокие или низкие температуры.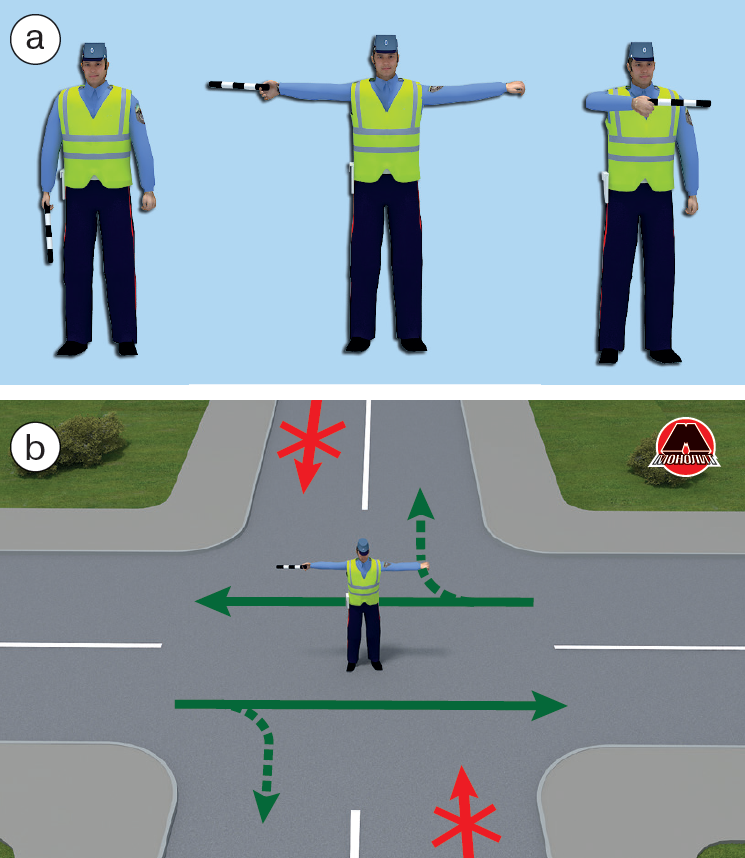
Чтобы аппаратное обеспечение автопилота могло предоставлять как можно более точную информацию, держите камеры и датчики в чистоте, не загораживайте их и не допускайте повреждений.Время от времени удаляйте скопившуюся грязь, протирая камеры и датчики мягкой тканью, смоченной теплой водой.
Как использовать функции автопилота?
Перед использованием автопилота прочтите руководство пользователя, чтобы получить инструкции и дополнительную информацию по технике безопасности. При использовании функций автопилота вы обязаны сохранять бдительность, безопасно управлять автомобилем и постоянно контролировать свой автомобиль.
Активация автопилота в Model S и Model X
 vimeo.com/video/283974100?color=cc0000&title=0&byline=0&portrait=0″ webkitallowfullscreen=»»/>
vimeo.com/video/283974100?color=cc0000&title=0&byline=0&portrait=0″ webkitallowfullscreen=»»/>
Активация автопилота в Model 3 и Model Y
Сколько времени требуется для калибровки автопилота, прежде чем вы сможете его включить?
Прежде чем функции автопилота можно будет использовать в первый раз, камеры должны пройти процесс самокалибровки.Калибровка обычно завершается после проезда 20-25 миль, но расстояние зависит от дорожных условий и условий окружающей среды. Свяжитесь с Tesla, если ваш автомобиль не прошел процесс калибровки после того, как проехал 100 миль.
Обнаружение слепых зон?
Чтобы повысить безопасность и уверенность при смене полосы движения, автомобили, выпущенные с октября 2016 года, будут отображать красную линию полосы движения, когда включен сигнал поворота и обнаружен автомобиль или препятствие на выбранной полосе движения.Это включает в себя улучшенный мониторинг слепых зон на приборной панели, который отражает тип автомобиля в вашей слепой зоне, дополняя и без того внимательного водителя.
Управление дорожным движением — обзор
Разметка дорожного покрытия
Согласно MUTCD (FHWA, 2009 г.), разметка дорожного покрытия предназначена для предоставления указаний, предупреждений, правил или другой информации участникам дорожного движения и может работать в сочетании с дорожными знаками и сигналы или могут использоваться отдельно. MUTCD также указывает, что основное ограничение дорожной разметки заключается в том, что она имеет ограниченную видимость при определенных условиях проезжей части, например, ночью или при наличии снега или мусора. Видимость также может быть снижена, поскольку материалы дорожной разметки изнашиваются со временем и при интенсивном движении.
Видимость также может быть снижена, поскольку материалы дорожной разметки изнашиваются со временем и при интенсивном движении.
Как и в случае знаков, каждый аспект дорожной разметки, от цвета до ширины и рисунка, имеет особое значение. Например, во многих юрисдикциях в разметке дорожного покрытия используются разные цвета для разных целей. В США используются пять цветов (FHWA, 2009): белый (разделение транспорта, движущегося в одном направлении, и края проезжей части), желтый (разделение транспорта, движущегося в противоположных направлениях, и разделение двустороннего поворота). полосы движения), красный (автобусы для грузовиков или полосы движения с односторонним движением, на которые нельзя въезжать со стороны дорожной разметки), синий (парковка для инвалидов) и фиолетовый (для обозначения полос для взимания платы за проезд для транспортных средств с электронными счетами для взимания платы за проезд) .Черный цвет также можно использовать, но только для увеличения контраста другой дорожной разметки на светлых дорогах. Видимость дорожной разметки в ночное время может быть улучшена за счет использования световозвращающих материалов (например, Carlson, Miles, Pratt, & Pike, 2005), и это требуется в США, если в ночное время участок не освещен должным образом (FHWA, 2009).
Видимость дорожной разметки в ночное время может быть улучшена за счет использования световозвращающих материалов (например, Carlson, Miles, Pratt, & Pike, 2005), и это требуется в США, если в ночное время участок не освещен должным образом (FHWA, 2009).
Большая часть исследований дорожной разметки и поведения пожилых водителей была сосредоточена на видимости, и результаты исследований показывают, что пожилым водителям труднее видеть разметку ночью и в плохую погоду, чем молодым водителям.(например, Benekohal et al., 1992; Berces & Robertson, 2012; Diamandouros & Gatscha, 2016; Graham, Harrold, & King, 1996; Horberry, Anderson, & Regan, 2006; Molino, Opiela, Andersen, & Moyer, 2003). ; Schnell, Aktan, & Lee, 2003; Zwahlen & Schnell, 1999). Например, в ходе полевого исследования, проведенного на заброшенной взлетно-посадочной полосе, изучалось расстояние обнаружения дорожной разметки в ночное время между молодыми и пожилыми водителями с использованием различных световозвращающих материалов (Zwahlen & Schnell, 1999). Исследование показало, что расстояния обнаружения были примерно на 30–39% больше (т.е., лучшая видимость) для младших водителей в различных условиях световозвращения и дальнего/ближнего света. Аналогичное исследование в Новой Зеландии, в котором сравнивалась неотражающая и световозвращающая разметка дорожного покрытия, показало, что у пожилых водителей показатель видимости примерно на 23% хуже, чем у более молодых водителей (Dravitzki, Wilkie, & Lester, 2006).
Исследование показало, что расстояния обнаружения были примерно на 30–39% больше (т.е., лучшая видимость) для младших водителей в различных условиях световозвращения и дальнего/ближнего света. Аналогичное исследование в Новой Зеландии, в котором сравнивалась неотражающая и световозвращающая разметка дорожного покрытия, показало, что у пожилых водителей показатель видимости примерно на 23% хуже, чем у более молодых водителей (Dravitzki, Wilkie, & Lester, 2006).
Как и в случае знаков, в ряде публикаций представлены рекомендации и/или передовой опыт в отношении дорожной разметки, чтобы помочь пожилым водителям (Box et al., 2010; Брюэр и Бедсол, 2015; ФХВА, 2003а; Файлдс и др., 2004 г.; Ригдон и др., 2014). В таблице 13.2 показана выборка этих рекомендаций вместе с проблемой старения, рассматриваемой в каждой рекомендации.
Правила безопасного вождения (для подростков)
Как осторожный водитель, вы можете избежать аварий и помочь снизить риск за рулем.
Если вы ездили по дорогам, то знаете, что не все водят хорошо – но большинство людей так думают.Некоторые водители агрессивно ускоряются. Другие уходят в другую полосу, потому что не обращают внимания. Водители могут следовать слишком близко, совершать резкие повороты, не сигнализируя, или входить в движение и выезжать из него.
Агрессивные водители являются известными дорожными опасностями, являющимися причиной одной трети всех дорожно-транспортных происшествий. Но невнимательное или рассеянное вождение становится все более серьезной проблемой, поскольку люди «многозадачны», разговаривая по телефону, отправляя текстовые сообщения или проверяя сообщения, принимая пищу или даже смотря телевизор во время вождения.
Вы не можете контролировать действия других водителей.Но обновление навыков безопасного вождения может помочь вам избежать опасностей, связанных с плохим вождением других людей.
Навыки, которые позволят вам контролировать ситуацию
Прежде чем сесть за руль этой двухтонной рамы из стекла и стали, вот несколько советов, которые помогут вам сохранить контроль:
Сосредоточьтесь. Вождение — это прежде всего мыслительная задача, и вам есть о чем подумать, когда вы за рулем: дорожные условия, ваша скорость и положение, соблюдение правил дорожного движения, знаки, сигналы, дорожная разметка, следование направлениям, осведомленность машин вокруг вас, глядя в зеркала — список можно продолжить.Сосредоточенность на вождении — и только на вождении — имеет решающее значение для безопасного вождения.
Вождение — это прежде всего мыслительная задача, и вам есть о чем подумать, когда вы за рулем: дорожные условия, ваша скорость и положение, соблюдение правил дорожного движения, знаки, сигналы, дорожная разметка, следование направлениям, осведомленность машин вокруг вас, глядя в зеркала — список можно продолжить.Сосредоточенность на вождении — и только на вождении — имеет решающее значение для безопасного вождения.
Отвлекающие факторы, такие как разговор по телефону или прием пищи, мешают водителю видеть потенциальные проблемы и правильно реагировать на них. Виноваты не только подростки-водители: люди, которые какое-то время водили за рулем, могут стать слишком самоуверенными в своих водительских способностях и позволить своим навыкам вождения стать неряшливыми. Все водители должны напоминать себе, что нужно сохранять концентрацию.
Будьте начеку. Бдительность (не сонливость и не пьянство) позволяет быстро реагировать на потенциальные проблемы — например, когда водитель впереди идущего автомобиля резко нажимает на тормоза в последнюю минуту. Очевидно, что алкоголь или наркотики (включая лекарства, отпускаемые по рецепту и без рецепта) влияют на время реакции и суждение водителя. Вождение в сонном состоянии имеет тот же эффект и является одной из основных причин аварий. Так что отдохните перед поездкой.
Очевидно, что алкоголь или наркотики (включая лекарства, отпускаемые по рецепту и без рецепта) влияют на время реакции и суждение водителя. Вождение в сонном состоянии имеет тот же эффект и является одной из основных причин аварий. Так что отдохните перед поездкой.
Следите за другим парнем. Часть контроля заключается в том, чтобы знать о других водителях и участниках дорожного движения вокруг вас (и о том, что они могут внезапно сделать), поэтому вы с меньшей вероятностью будете застигнуты врасплох.Например, если автомобиль мчится мимо вас по шоссе, но между автомобилем и медленно движущимся по той же полосе грузовиком не так много места, вполне вероятно, что водитель попытается выехать на вашу полосу прямо перед вами. . Предвидя действия другого водителя и внося соответствующие коррективы, вы снижаете свой риск.
стр. 2
Восемь секретов супервождения
Когда вы ведете машину в обороне, вы осознаете и готовы ко всему, что бы ни случилось. Вы осторожны, но готовы действовать и не отдавать свою судьбу в руки других водителей.По данным Министерства транспорта США, 90% всех аварий происходит по вине водителей.
Вы осторожны, но готовы действовать и не отдавать свою судьбу в руки других водителей.По данным Министерства транспорта США, 90% всех аварий происходит по вине водителей.
Соблюдение этих советов по безопасному вождению поможет снизить риск за рулем:
- Прежде всего думайте о безопасности. Если вы сами избегаете агрессивного и невнимательного поведения за рулем, у вас будет больше шансов справиться с плохим вождением других людей. Оставьте достаточно места между вами и впереди идущей машиной. Всегда запирайте двери и пристегивайтесь ремнем безопасности, чтобы не вылететь из машины в случае аварии.
- Следите за своим окружением — будьте внимательны. Чаще проверяйте свои зеркала и сканируйте условия на 20–30 секунд раньше вас. Держите глаза в движении. Если транспортное средство демонстрирует признаки агрессивного вождения, притормозите или остановитесь, чтобы избежать его. Если водитель ведет машину настолько опасно, что вас это беспокоит, постарайтесь съехать с проезжей части, повернув направо или выбрав следующий съезд, если это безопасно. Также следите за пешеходами, велосипедистами и домашними животными на дороге.
- Не зависеть от других драйверов. Будь внимателен к другим, но береги себя. Не думайте, что другой водитель собирается уйти с дороги или позволит вам слиться. Предполагайте, что водители будут проезжать на красный свет или знаки остановки, и будьте готовы реагировать. Планируйте свои действия, предвидя наихудший сценарий.
- Следуйте правилу от 3 до 4 секунд. Поскольку наибольшая вероятность столкновения находится перед вами, использование правила 3-4 секунд поможет вам установить и поддерживать безопасную дистанцию следования и даст вам достаточно времени, чтобы при необходимости затормозить до полной остановки.Но это правило работает только при обычном движении и хороших погодных условиях. В плохую погоду увеличивайте дистанцию следования на дополнительную секунду для каждого условия, такого как дождь, туман, вождение в ночное время или следование за большим грузовиком или мотоциклом.
- Сбавь скорость. Указанные ограничения скорости относятся к идеальным условиям. Вы несете ответственность за то, чтобы ваша скорость соответствовала условиям. Кроме того, более высокие скорости значительно усложняют управление автомобилем, если что-то пойдет не так.Чтобы сохранить контроль над своим транспортным средством, вы должны контролировать свою скорость.
- Найдите путь к отступлению. Лучший способ избежать потенциальной опасности во всех дорожных ситуациях — расположить автомобиль так, чтобы у вас было больше шансов увидеть и быть увиденным. Наличие альтернативного пути передвижения также имеет важное значение, поэтому всегда оставляйте себе место, куда можно переместить свой автомобиль, если ваш непосредственный путь путешествия внезапно заблокирован.
- Отдельные риски. При столкновении с несколькими рисками лучше управлять ими по одному.Ваша цель — не сталкиваться со слишком большим количеством рисков одновременно.
- Избавьтесь от отвлекающих факторов. Отвлечение — это любая деятельность, которая отвлекает ваше внимание от управления автомобилем. Вождение заслуживает вашего полного внимания — так что сосредоточьтесь на вождении.
 Также следите за пешеходами, велосипедистами и домашними животными на дороге.
Также следите за пешеходами, велосипедистами и домашними животными на дороге.

Если вы хотите пройти курс безопасного вождения, чтобы улучшить свои знания и навыки вождения, обратитесь в местное отделение AAA или в Департамент транспортных средств (DMV) вашего штата. Во многих штатах есть список утвержденных поставщиков курсов безопасного вождения, и многие из них предлагают онлайн-программы.В некоторых штатах вы можете иметь право на скидки на страховые взносы, «положительные» баллы за безопасное вождение или другие льготы. Эти курсы стоят денег, но они того стоят, чтобы стать более умным и безопасным водителем.
Безопасное вождение!
Устройства управления дорожным движением для объектов
Предотвратите несчастные случаи на вашей стоянке и на вашем участке
Средства, использующие устройства управления дорожным движением, могут сообщать об ожиданиях и определять небрежность.
При обустройстве большого кампуса, объекта или автостоянки безопасность дорожного движения ложится на планировщик участка.Отличный контроль дорожного движения важен от обращения до вывесок. К счастью, на большинстве объектов скорость движения ниже, чем на дорогах общего пользования и автомагистралях, что снижает риск. С другой стороны, люди и автомобили могут с большей вероятностью делить дорогу с пешеходами, которые могут хаотично переходить дорогу через парковки. На парковке дети чаще оказываются на дорожном покрытии. Кроме того, модели трафика могут быть не так хорошо установлены или поняты. Учреждения могут брать пример с дорог общего пользования и устанавливать устройства управления дорожным движением, чтобы обеспечить безопасность пользователей.
Что такое устройство управления дорожным движением?
Устройства управления дорожным движением направляют, направляют и информируют водителей с помощью визуальных или тактильных индикаторов. Устройства делятся на четыре основные категории: знаки; сигналы; проектирование и разметка дорог; и барьеры или канализаторы.
Типы устройств управления дорожным движением на дорогах общего пользования
На дорогах общего пользования используется широкий набор инструментов управления дорожным движением, которые можно адаптировать к небольшим объектам. Однако на дорогах общего пользования внимание водителя, как правило, сосредоточено на знаках и сигналах.На небольших объектах дорожная разметка и ограждения могут брать на себя большую долю нагрузки.
Знаки
Дорожные знаки предоставляют водителям информацию о местности. Изготовленные из светоотражающего материала высококонтрастных цветов, они хорошо видны в свете фар ночью. Знаки могут использовать слова и символы для передачи значения.
Предписывающие знаки являются наиболее важными знаками на дороге. Они заявляют о принятом законном использовании проезжей части общего пользования.
Управление перекрестком определяет правильное поведение при пересечении дорог — такие знаки, как «стоп» или «уступи дорогу», необходимы для предотвращения конфликтов и аварий. Изменения ограничения скорости также отмечены знаками. Направление движения можно указать, как в одну сторону, так и без знаков въезда. Разрешенные остановки или парковочные места обычно отмечены. Несоблюдение нормативных знаков часто представляет собой движущееся нарушение.
Изменения ограничения скорости также отмечены знаками. Направление движения можно указать, как в одну сторону, так и без знаков въезда. Разрешенные остановки или парковочные места обычно отмечены. Несоблюдение нормативных знаков часто представляет собой движущееся нарушение.
Предупреждающие знаки позволяют водителям быть в курсе опасностей при вождении, таких как переходы животных или извилистые дорожки. Они установлены для максимальной безопасности.
Направляющие или информационные знаки предоставляют информацию о маршруте и удобствах, чтобы помочь водителям найти пункт назначения.Информация о маршруте и выезде, а также информация об остановках для отдыха, заправке и еде, а также о туристических достопримечательностях — все это попадает в эту категорию.
Светофоры красного, желтого и зеленого цвета повсеместно используются в системе управления дорожным движением. К стандартным трем огням могут быть добавлены указатели полосы движения и другая индивидуальная разметка полосы движения. Мигающие огни, либо в традиционном сигнале, либо висящие отдельно, являются обычным явлением. Однако они могут иметь разное значение в зависимости от региона и цвета.Постоянно горящие огни часто используются в качестве предупреждений или знаков опасности.
Мигающие огни, либо в традиционном сигнале, либо висящие отдельно, являются обычным явлением. Однако они могут иметь разное значение в зависимости от региона и цвета.Постоянно горящие огни часто используются в качестве предупреждений или знаков опасности.
Дорожная разметка и дорожное строительство
Дизайн дорог предлагает еще один словарь для общения с водителями.
Дорожная разметка , такие как линии и стрелки, используются для обозначения правильного законного использования дорожных покрытий. Они включают в себя стоп-линии, маркеры полосы движения, стрелки полосы поворота и многое другое. Дорожная разметка, такая как «обломки», показывающая, что велосипеды и автомобили разделяют дорогу, уведомляет водителей о неожиданных схемах движения.
Строительство дорог также участвует в управлении дорожным движением. Грохотные полосы могут обозначать полосы движения. Когда автомобиль проезжает над ними, они предупреждают звуком и текстурой, что автомобиль больше не находится на своей полосе. Отбойные полосы часто используются в местах, где водители могут пропустить крутой поворот дороги, или на длинных участках, где водитель может заснуть. Другое дорожное строительство и экологический дизайн упрощают определенные действия при вождении, чем другие. Лежачие полицейские и ухабы, шиканы, неровности, удлинители бордюров, кольцевые развязки и многое другое могут способствовать правильному поведению водителя.
Отбойные полосы часто используются в местах, где водители могут пропустить крутой поворот дороги, или на длинных участках, где водитель может заснуть. Другое дорожное строительство и экологический дизайн упрощают определенные действия при вождении, чем другие. Лежачие полицейские и ухабы, шиканы, неровности, удлинители бордюров, кольцевые развязки и многое другое могут способствовать правильному поведению водителя.
Барьеры и канализаторы
Барьеры и направляющие также контролируют движение, предупреждают об опасностях и смягчают последствия несчастных случаев. Есть много типов.
Дорожные ограничители и конусы часто устанавливаются временно для предупреждения об опасностях или рабочих зонах.
Дорожные барьеры , как и стандартные барьеры из джерси, помогают предотвратить лобовые столкновения и обозначают полосы движения. Иногда они могут смягчить или предотвратить аварии с малым углом, вернув автомобиль на проезжую часть. Дорожные барьеры могут быть закрытыми или не закрытыми, либо смягчая удар автомобиля, но пропуская его, либо полностью останавливая его.
Разделители каналов и дорожные барьеры , будь то бочки, бордюры или столбы, являются более постоянными, чем ограничители движения или конусы, хотя некоторые из них могут быть съемными для мест с множественным доступом.
Гибкие, ударопрочные или защитные болларды используются для отвода трафика от определенных зон. Ударопрочные и защищенные типы обеспечивают защиту от ударов, которая очень эффективна при лобовом столкновении или столкновении под глубоким углом.
Применяются ли правила дорожного движения на парковках или в частных местах?
В некоторых штатах и на большей части территории Канады необходимо соблюдать дорожную разметку на частных территориях, таких как парковки. В этих юрисдикциях несоблюдение известного маркера, такого как знак ограничения скорости в кампусе, может привести к выписыванию штрафов местной полицией.
В других юрисдикциях знаки на частной собственности не несут такой же возможности для обеспечения соблюдения правил перемещения. Например, в Онтарио, Канаде или штате Вашингтон водитель не может получить штраф за неподчинение отмеченному знаку на частной парковке.
Однако даже в этих юрисдикциях существуют уголовные законы, регулирующие использование автотранспортных средств. Водителям по-прежнему могут быть предъявлены обвинения в таких вещах, как халатность, безрассудная угроза, нападение на транспортное средство или убийство. Владелец частной собственности также может запретить водителю возвращаться в свою собственность.
Таким образом, менеджер объекта может использовать стандартную дорожную разметку и знаки, чтобы сообщить, как они хотели бы использовать свое пространство. Даже в юрисдикциях, где сотрудники дорожного движения не могут штрафовать тех, кто не подчиняется, они сообщают то, что ожидается достаточно, чтобы отказ мог представлять собой безрассудную угрозу или халатность.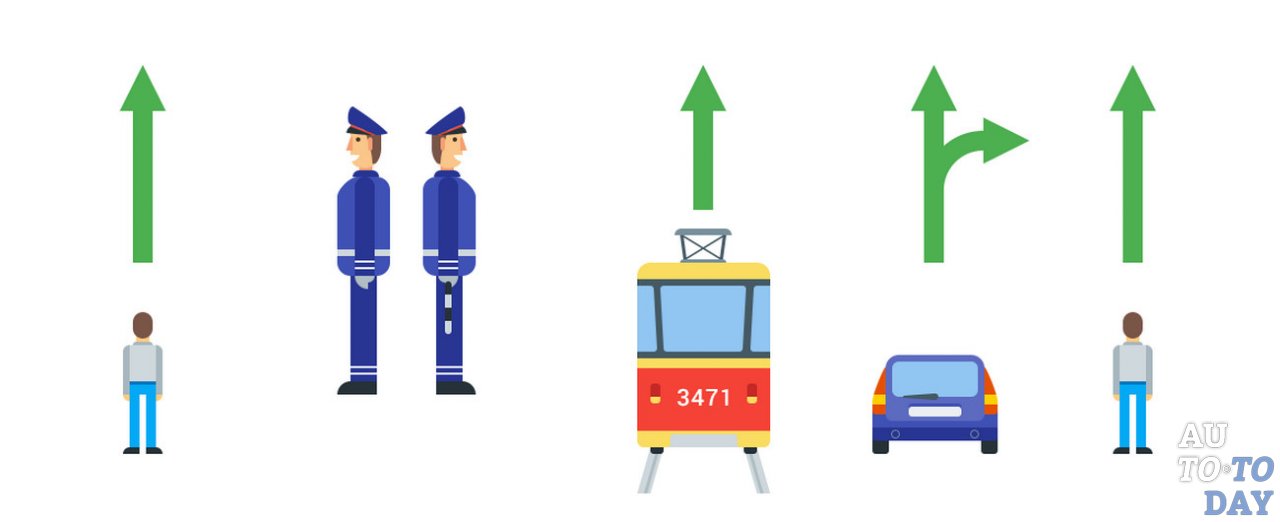
Устройства управления движением для частных объектов
Частное управление дорожным движением часто сильно зависит от барьеров, каналов и дизайна. Освещение встречается реже, за исключением очень больших помещений, из-за дороговизны и содержания.
Горки, кочки и упоры
Лежачие полицейские и неровности являются очень распространенной формой регулирования дорожного движения на парковках. Они также очень полезны в проходах в жилых или коммерческих комплексах, а также в крупных деловых или образовательных кампусах.Лежачие полицейские обеспечивают более агрессивный контроль скорости, чем лежачие полицейские. Парковочные остановки помогают предотвратить проезд автомобилей через пустые места и создание новых, возможно, небезопасных схем движения.
Знаки
Наиболее распространенными знаками на парковках являются полосатые предупреждающие знаки, украшающие опорные стойки и разделители полос движения. Тем не менее, знаки ограничения скорости могут быть очень полезны в сочетании с неровностями и ухабами, чтобы предупредить людей о максимально комфортных скоростях. Знаки остановки важны на больших участках и в гаражах, где есть перекрестки, которые могут привести к конфликту водителей.Знаки с односторонним движением также могут быть полезны в некоторых ситуациях, особенно в гаражах и комплексах, хотя вместо этого направление движения может быть указано дорожной разметкой.
Дорожная разметка
Дорожная разметка может быть очень важна для сквозных проездов в жилом или коммерческом комплексе для контроля движения между зданиями. Любая обычная уличная разметка может использоваться для сообщения об ожидаемом поведении, от узких мест до стоп-линий. На парковках также можно использовать дорожную разметку. Стрелки, указывающие направление движения, например, в проходах с односторонним движением, чаще используются на парковках, чем односторонние знаки.Стоп-линии и полосы поворота также могут быть важны при управлении дорожным движением вблизи крутых поворотов, которые могут возникать в небольших помещениях. Пешеходный переход и полоса зебры создают маркированные пешеходные зоны, чтобы пешеходы и водители могли безопасно добраться до своих автомобилей.
Пешеходный переход и полоса зебры создают маркированные пешеходные зоны, чтобы пешеходы и водители могли безопасно добраться до своих автомобилей.
Конечно, самой распространенной дорожной разметкой на парковке является указатель киоска, на котором указывается место, отведенное для каждой припаркованной машины. Маркеры киосков также могут помочь указать направление движения, если они нарисованы под углом, поскольку парковки часто проектируются с ориентацией парковки, которая максимизирует как пространство, так и транспортный поток.Маркировка доступных мест также во многом помогает ограничить проблемы для пользователей.
Барьеры и канализаторы
Болларды и трикотажные барьеры полезны в гаражах. Гибкие болларды полезны в качестве парковочных упоров в стойлах с задним ходом, а также в качестве упора и ориентира для позиционирования. Они также являются очень удобными маркерами полос на круговых пандусах, которые требуют определенной гибкости для больших грузовиков, чтобы двигаться по более чем одной полосе. Аварийные и защитные столбы помогают предотвратить ошибку педали или проникновение в витрину магазина.Конечно, временные разделители каналов, такие как конусы и разделители, полезны для временных опасностей или строительства.
Аварийные и защитные столбы помогают предотвратить ошибку педали или проникновение в витрину магазина.Конечно, временные разделители каналов, такие как конусы и разделители, полезны для временных опасностей или строительства.
Управление трафиком и защита сайта
Создание частного объекта с доступом для транспортных средств означает необходимость обеспечения безопасности людей, имущества, коммунальных услуг и зданий. Ошибки педалей, медицинские показания и ошибки водителей могут привести к авариям — в США каждый день происходит 60 аварий с витринами магазинов. Низкие заявленные скорости и тщательное планирование с помощью дорожной разметки, ориентации при парковке и окружающей среды могут не остановить все это, но могут смягчить ущерб.Защитные барьеры и болларды могут добавить дополнительную безопасность. Руководителю объекта нет необходимости изобретать велосипед: разметка для управления дорожным движением на дорогах общего пользования предлагает хорошо понятный словарь для обозначения желаемого поведения. Даже в штатах и провинциях, где нарушения правил дорожного движения и штрафы не могут выдаваться на частных дорогах и участках, четкая коммуникация означает, что небрежность водителей подлежит принудительному исполнению. Использование мер контроля трафика может помочь вашим пользователям и вашему имуществу оставаться в безопасности.
Даже в штатах и провинциях, где нарушения правил дорожного движения и штрафы не могут выдаваться на частных дорогах и участках, четкая коммуникация означает, что небрежность водителей подлежит принудительному исполнению. Использование мер контроля трафика может помочь вашим пользователям и вашему имуществу оставаться в безопасности.
Статьи по теме:
Модель извлечения и прогнозирования действий авиадиспетчера с использованием подхода машинного обучения
В управлении воздушным движением воздушное пространство разделено на несколько небольших секторов для лучшего управления воздушным движением и рабочей нагрузкой авиадиспетчеров.Управление такими секторами обычно осуществляет команда из двух авиадиспетчеров: диспетчера планирования ( D — сторона) и исполнительного диспетчера ( R — сторона). D — боковой диспетчер отвечает за обработку информации о плане полета для планирования и организации потока трафика, входящего в сектор. Р — Боковой диспетчер занимается обеспечением безопасности полетов в своем секторе. Лучшее понимание и предсказуемость действий контроллера на стороне D для данного сценария трафика может помочь в автоматизации некоторых его задач и, следовательно, снизить рабочую нагрузку.В этой статье мы предлагаем модель обучения для прогнозирования действий контроллера на стороне D . Задача обучения моделируется как задача обучения с учителем, где целевыми переменными являются действия контроллера на стороне D , а объясняющими переменными являются особенности траектории летательного аппарата в 4D. Модель обучается на шестимесячных данных ADS-B по маршрутному участку, и ее характеристики обобщения оценивались с использованием перекрестной проверки на том же участке. Результаты показывают, что модель действия вертикального маневра обеспечивает самую высокую точность прогнозирования (99%).Кроме того, модель изменения скорости и изменения курса обеспечивает точность предсказуемости 80% и 87% соответственно. Модель для прогнозирования набора всех действий (высоты, скорости и изменения курса) для каждого полета достигает точности 70%, что соответствует 70% полетов; D Действие контроллера на стороне можно предсказать по информации о траектории в позиции входа в сектор.
Лучшее понимание и предсказуемость действий контроллера на стороне D для данного сценария трафика может помочь в автоматизации некоторых его задач и, следовательно, снизить рабочую нагрузку.В этой статье мы предлагаем модель обучения для прогнозирования действий контроллера на стороне D . Задача обучения моделируется как задача обучения с учителем, где целевыми переменными являются действия контроллера на стороне D , а объясняющими переменными являются особенности траектории летательного аппарата в 4D. Модель обучается на шестимесячных данных ADS-B по маршрутному участку, и ее характеристики обобщения оценивались с использованием перекрестной проверки на том же участке. Результаты показывают, что модель действия вертикального маневра обеспечивает самую высокую точность прогнозирования (99%).Кроме того, модель изменения скорости и изменения курса обеспечивает точность предсказуемости 80% и 87% соответственно. Модель для прогнозирования набора всех действий (высоты, скорости и изменения курса) для каждого полета достигает точности 70%, что соответствует 70% полетов; D Действие контроллера на стороне можно предсказать по информации о траектории в позиции входа в сектор. С точки зрения эксплуатационной проверки предлагаемый подход рассматривается как вспомогательный инструмент диспетчера УВД, а не как автономный инструмент.Таким образом, всегда существует элемент усмотрения ATCO, и по мере сбора большего количества действий ATCO модели можно дополнительно обучать для повышения точности. Для будущей работы мы рассмотрим возможность расширения набора функций, включая такие параметры, как погода и ветер. Кроме того, для измерения эффективности предлагаемого подхода будет выполняться моделирование с участием человека в цикле.
С точки зрения эксплуатационной проверки предлагаемый подход рассматривается как вспомогательный инструмент диспетчера УВД, а не как автономный инструмент.Таким образом, всегда существует элемент усмотрения ATCO, и по мере сбора большего количества действий ATCO модели можно дополнительно обучать для повышения точности. Для будущей работы мы рассмотрим возможность расширения набора функций, включая такие параметры, как погода и ветер. Кроме того, для измерения эффективности предлагаемого подхода будет выполняться моделирование с участием человека в цикле.
1. Введение
Основной целью управления воздушным движением (УВД) во всем мире является предотвращение столкновений, организация и ускорение потока воздушного движения, а также предоставление информации и другой поддержки пилотам [1].В регионах, где система управления воздушным движением (ОрВД) хорошо развита, три типа средств управления играют решающую роль на последовательном этапе типичного полета: (1) диспетчерский пункт аэропорта (аэродромный диспетчерский пункт), (2) центр управления воздушным пространством в районе аэродрома (управление заходом на посадку) и (3) центр управления полетом по маршруту (управление районом) [2]. Воздушное пространство на маршруте организовано по вертикали и горизонтали в соответствии с местной структурой воздушного движения, а воздушные потоки распределяются по меньшей площади, называемой «секторами».Сектор обычно рассматривается как основная «единица» объема воздушного пространства с точки зрения ОрВД. Маршрутным участком обычно управляет группа из двух авиадиспетчеров: диспетчера планирования ( D — сторона) и исполнительного диспетчера ( R — сторона) [3].
Воздушное пространство на маршруте организовано по вертикали и горизонтали в соответствии с местной структурой воздушного движения, а воздушные потоки распределяются по меньшей площади, называемой «секторами».Сектор обычно рассматривается как основная «единица» объема воздушного пространства с точки зрения ОрВД. Маршрутным участком обычно управляет группа из двух авиадиспетчеров: диспетчера планирования ( D — сторона) и исполнительного диспетчера ( R — сторона) [3].
Авиадиспетчеры (ATCO) со стороны D и R отвечают за мониторинг воздушного пространства, обнаружение конфликтов и их разрешение, а также за управление запросами на изменение маршрута или высоты от воздушного судна.Разница между этими двумя ролями заключается в стратегическом и тактическом уровнях вмешательства. Диспетчер стороны D в первую очередь отвечает за обработку информации о плане полета для планирования, координации и организации потока воздушного движения, входящего в сектор. Контроллер стороны D использует информацию о плане полета и применяет средство обнаружения среднесрочных конфликтов (MTCD) [4] для прогнозирования траекторий воздушных судов в 20-минутном временном окне просмотра вперед. D -боковой контроллер использует различные стратегии/действия, т.е.т. е. сочетание высоты, скорости, изменения курса, маневров удержания и т. д. для поддержания упорядоченного потока входящего трафика в секторе. Таким образом, он сводит к минимуму случаи пересечения, которые могут привести к потере эшелонирования. Это гарантирует, что на тактическом уровне требуется минимальное вмешательство со стороны диспетчера R при управлении воздушным движением в заданном секторе. Контроллер R использует инструмент предупреждения о краткосрочных конфликтах (STCA) [5] для прогнозирования любой потери эшелонирования в временном окне просмотра от 4 до 8 минут.Боковой контроллер R в основном занимается тактическими вмешательствами для обеспечения безопасного разделения между полетами.
Контроллер стороны D использует информацию о плане полета и применяет средство обнаружения среднесрочных конфликтов (MTCD) [4] для прогнозирования траекторий воздушных судов в 20-минутном временном окне просмотра вперед. D -боковой контроллер использует различные стратегии/действия, т.е.т. е. сочетание высоты, скорости, изменения курса, маневров удержания и т. д. для поддержания упорядоченного потока входящего трафика в секторе. Таким образом, он сводит к минимуму случаи пересечения, которые могут привести к потере эшелонирования. Это гарантирует, что на тактическом уровне требуется минимальное вмешательство со стороны диспетчера R при управлении воздушным движением в заданном секторе. Контроллер R использует инструмент предупреждения о краткосрочных конфликтах (STCA) [5] для прогнозирования любой потери эшелонирования в временном окне просмотра от 4 до 8 минут.Боковой контроллер R в основном занимается тактическими вмешательствами для обеспечения безопасного разделения между полетами.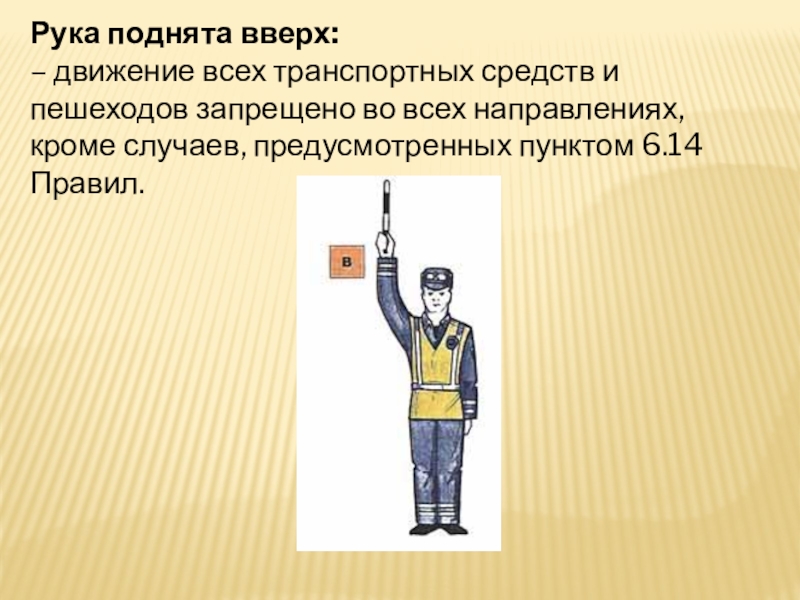
Диспетчер стороны D получает информацию о плане полета перед входом в сектор (передача связи). В этот момент воздушное судно находится в контакте как с контроллером на стороне предыдущего сектора D , так и с контроллером на стороне следующего сектора D . Диспетчер стороны D затем согласовывает с воздушным судном эшелон входа, скорость входа и точку входа в зависимости от стратегической ситуации в его / ее секторе в определенное время просмотра вперед.Основной целью этого планирования является поддержание упорядоченного потока движения и минимизация пересечений, которые могут привести к сценарию потери эшелонирования (LOS) для вмешательства R — бокового диспетчера. Как только воздушное судно входит в границы сектора (передача управления), сторона D передает воздушное судно диспетчеру стороны R , который затем предоставляет услуги УВД по радиосвязи. В некоторых обстоятельствах (например, в плохую погоду) может потребоваться передача самолета иначе, чем в письме-соглашении.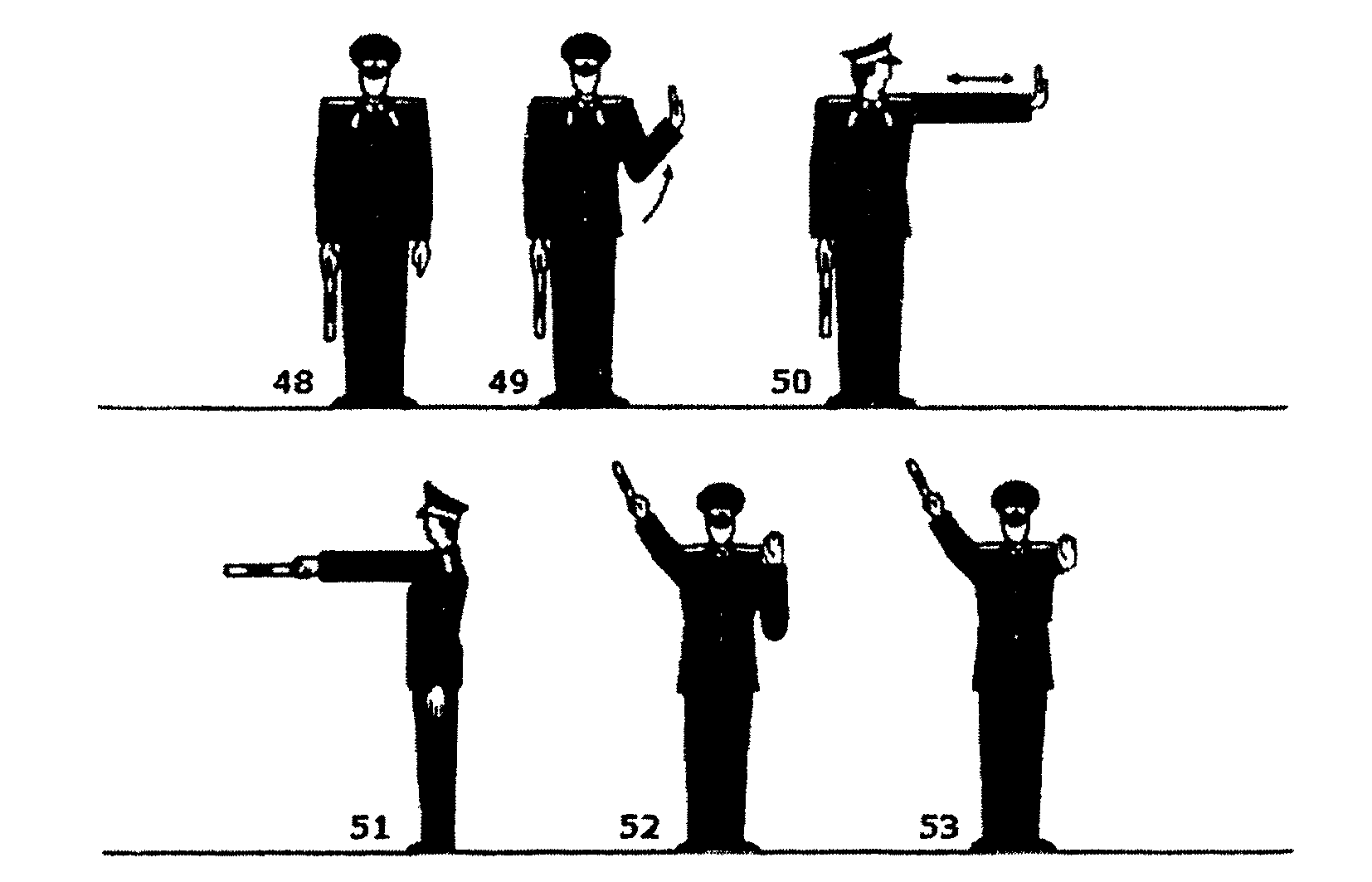 В этих случаях диспетчер D со стороны должен согласовать с диспетчером другого сектора запрос на утверждение другого маршрута, который не указан в письме-соглашении, до того, как воздушное судно пересечет границу.
В этих случаях диспетчер D со стороны должен согласовать с диспетчером другого сектора запрос на утверждение другого маршрута, который не указан в письме-соглашении, до того, как воздушное судно пересечет границу.
Поскольку УВД становится все более сложным и динамичным, роль диспетчеров УВД в системе УВД становится все более сложной [6]. В критической для безопасности области УВД рабочая нагрузка остается доминирующим соображением при повышении производительности системы УВД. Поскольку основной обязанностью диспетчера D является управление и организация воздушного потока таким образом, чтобы свести к минимуму тактическое вмешательство в полет со стороны диспетчера R , желательно автоматизировать такие задачи диспетчера D , как что его рабочая нагрузка снижается.Возможным способом является разработка механизма, который может изучать и прогнозировать стратегии управления трафиком контроллера D для заданного сценария трафика.
Вклад этой статьи заключается в моделировании проблемы обучения путем извлечения действий контроллера D на стороне. Новизна заключается в формулировке проблемы как предсказания количественного ответа на наблюдение, т. Е. Классификации этого наблюдения, поскольку она включает в себя отнесение наблюдения к классу. Таким образом, мы подошли к классической проблеме имитационного моделирования как к проблеме, управляемой данными, где стратегии контроллера изучаются на основе естественного поведения человека, D , контроллера на стороне, того, как он/она обрабатывает различные сценарии дорожного движения.Эта задача требует визуализации, анализа и понимания данных о траектории трафика за 6 месяцев, чтобы сформулировать разумный и разрешимый вопрос. Кроме того, еще один вклад в эту статью касается механизмов обучения, которые могут обеспечить лучшую предсказуемость для планирования контроллеров при различных сценариях трафика. Мы внедрили древовидные ансамблевые методы для изучения действий ATCO в сложных условиях воздушного движения на реальном наборе данных. Метод включает в себя сегментацию пространства предикторов на несколько простых областей, а затем для того, чтобы сделать предсказание по заданному наблюдению, используется среднее или мода обучающих наблюдений в области, к которой оно принадлежит.
Новизна заключается в формулировке проблемы как предсказания количественного ответа на наблюдение, т. Е. Классификации этого наблюдения, поскольку она включает в себя отнесение наблюдения к классу. Таким образом, мы подошли к классической проблеме имитационного моделирования как к проблеме, управляемой данными, где стратегии контроллера изучаются на основе естественного поведения человека, D , контроллера на стороне, того, как он/она обрабатывает различные сценарии дорожного движения.Эта задача требует визуализации, анализа и понимания данных о траектории трафика за 6 месяцев, чтобы сформулировать разумный и разрешимый вопрос. Кроме того, еще один вклад в эту статью касается механизмов обучения, которые могут обеспечить лучшую предсказуемость для планирования контроллеров при различных сценариях трафика. Мы внедрили древовидные ансамблевые методы для изучения действий ATCO в сложных условиях воздушного движения на реальном наборе данных. Метод включает в себя сегментацию пространства предикторов на несколько простых областей, а затем для того, чтобы сделать предсказание по заданному наблюдению, используется среднее или мода обучающих наблюдений в области, к которой оно принадлежит. Затем такой набор правил разбиения использовался для сегментации пространства предикторов, а затем суммировался в виде дерева. Затем такие несколько деревьев можно объединить для получения точного консенсуса [7]. Кроме того, мы продемонстрировали, что древовидные методы могут лучше отражать процесс принятия решений человеком, чем другие подходы к классификации [8]. Несмотря на то, что используемые модели обучения хорошо известны, подготовка аналитического набора данных для их обучения затруднена из-за шумов и отсутствия траекторий.Кроме того, обнаружение и удаление выбросов, таких как удерживание или неполные траектории в этих условиях, также является еще одной проблемой.
Затем такой набор правил разбиения использовался для сегментации пространства предикторов, а затем суммировался в виде дерева. Затем такие несколько деревьев можно объединить для получения точного консенсуса [7]. Кроме того, мы продемонстрировали, что древовидные методы могут лучше отражать процесс принятия решений человеком, чем другие подходы к классификации [8]. Несмотря на то, что используемые модели обучения хорошо известны, подготовка аналитического набора данных для их обучения затруднена из-за шумов и отсутствия траекторий.Кроме того, обнаружение и удаление выбросов, таких как удерживание или неполные траектории в этих условиях, также является еще одной проблемой.
Этот документ организован следующим образом. В разделе 2 представлена предыстория этого исследовательского вопроса, в котором особое внимание уделяется успешному применению машинного обучения и древовидного ансамблевого обучения в управлении воздушным движением. Раздел 3 описывает обзор предлагаемого подхода для прогнозирования действий диспетчера планирования, включая этапы подготовки данных. В разделе 4 подробно обсуждаются этапы анализа и обработки данных для извлечения действий диспетчера авиадиспетчера из данных о траектории. Раздел 5 знакомит с нашей методологией разработки прогностических моделей с использованием двух различных методов ансамблевого обучения: случайного леса и экстремального повышения градиента. В разделе 6 описываются наши прогностические модели для прогнозирования решения диспетчера и времени руления для рейсов вылета, а также представлена наша экспериментальная установка для оценки прогностических моделей, а также обсуждение и анализ результатов.Раздел 7 представляет собой раздел обсуждения реализации команды ATCO на основе наших прогнозируемых результатов. Наконец, в разделе 8 представлены наши выводы и дальнейшая работа.
В разделе 4 подробно обсуждаются этапы анализа и обработки данных для извлечения действий диспетчера авиадиспетчера из данных о траектории. Раздел 5 знакомит с нашей методологией разработки прогностических моделей с использованием двух различных методов ансамблевого обучения: случайного леса и экстремального повышения градиента. В разделе 6 описываются наши прогностические модели для прогнозирования решения диспетчера и времени руления для рейсов вылета, а также представлена наша экспериментальная установка для оценки прогностических моделей, а также обсуждение и анализ результатов.Раздел 7 представляет собой раздел обсуждения реализации команды ATCO на основе наших прогнозируемых результатов. Наконец, в разделе 8 представлены наши выводы и дальнейшая работа.
2. Предыстория
Стремление понять и изучить стратегии противника в таких играх, как шахматы, нарды и игра в го, и иметь возможность предсказывать следующий ход противника, хорошо известно в литературе [9–12]. Методы машинного обучения, такие как глубокие нейронные сети, методы поиска по дереву и байесовское обучение с подкреплением, недавно оказались весьма успешными в изучении игровых стратегий и превзошли чемпионов мира [13–16]. Однако основным допущением в таких алгоритмах машинного обучения является то, что обучающие и будущие данные должны находиться в одном и том же пространстве признаков и иметь одинаковое распределение [17].
Однако основным допущением в таких алгоритмах машинного обучения является то, что обучающие и будущие данные должны находиться в одном и том же пространстве признаков и иметь одинаковое распределение [17].
В воздушном движении характерное пространство (структура воздушного пространства, включая его воздушные трассы и точки пути) и распределение данных (точки траектории полета самолета) значительно различаются. Поскольку каждое воздушное пространство уникально, каждый сценарий воздушного движения имеет разное распределение данных. Кроме того, управление потоком движения почти полностью зависит от решений авиадиспетчеров [18].Предыдущие исследования по выявлению стратегий авиадиспетчеров на основе данных о воздушном движении позволили сделать некоторые интересные выводы, но они носили общий характер и не позволяли предсказать действия диспетчера УВД в зависимости от сценария дорожного движения. Например, в [19] было установлено, что при наличии конфликта между несколькими самолетами стратегия изменения скорости оказывается более затратной (по времени полета), чем стратегия отклонения от курсового угла. В [4] авторы разработали эволюционную вычислительную основу для определения маневров воздушного движения, которые могут подвергнуть сценарий движения потере эшелонирования, но не позволяют обобщить его на ряд сценариев движения.В [20] авторы предсказали рабочую нагрузку авиадиспетчера из прошлых действий по слиянию и разделению секторов, но не смогли обобщить обучение на новые сектора из-за переобучения обучающих данных. В [21] авторы предложили использовать теорию игр для разрешения конфликтов в маршрутном воздушном пространстве. Помимо маршрутного воздушного пространства, методы машинного обучения также применялись в терминальном воздушном пространстве. Например, в [22] был разработан симулятор, который может имитировать управление воздушным движением, разрешение на посадку и вылет с использованием сети обратного распространения на основе различных управляющих параметров, но только для одной взлетно-посадочной полосы.
В [4] авторы разработали эволюционную вычислительную основу для определения маневров воздушного движения, которые могут подвергнуть сценарий движения потере эшелонирования, но не позволяют обобщить его на ряд сценариев движения.В [20] авторы предсказали рабочую нагрузку авиадиспетчера из прошлых действий по слиянию и разделению секторов, но не смогли обобщить обучение на новые сектора из-за переобучения обучающих данных. В [21] авторы предложили использовать теорию игр для разрешения конфликтов в маршрутном воздушном пространстве. Помимо маршрутного воздушного пространства, методы машинного обучения также применялись в терминальном воздушном пространстве. Например, в [22] был разработан симулятор, который может имитировать управление воздушным движением, разрешение на посадку и вылет с использованием сети обратного распространения на основе различных управляющих параметров, но только для одной взлетно-посадочной полосы.
С появлением авиационных данных и значительным прогрессом в вычислительной мощности методы, основанные на данных и машинном обучении, в последнее время стали очень многообещающим подходом к решению многих сложных задач в управлении воздушным движением, таких как прогнозирование времени выруливания [ 23, 24], определение последовательности воздушных судов [25], прогнозирование параметров характеристик воздушных судов [26], извлечение потока воздушного движения [27], прогнозирование задержек рейсов [28, 29] и прогнозирование траекторий воздушных судов [30, 31]. Однако, насколько известно авторам, не проводилось никаких исследований по извлечению действий или решений контроллера, а также изучению стратегии контроллера на основе реальных данных.
Однако, насколько известно авторам, не проводилось никаких исследований по извлечению действий или решений контроллера, а также изучению стратегии контроллера на основе реальных данных.
В этом исследовании мы рассматриваем древовидное ансамблевое обучение как наш алгоритм обучения, который применялся в различных областях, включая транспорт [32], энергетику [33, 34], создание сетей [35–37] и воздушное движение. управление [38, 39]. Он популярен не только тем, что позволяет достигать высоких уровней точности [32, 40], но также позволяет интерпретировать важность признаков, используемых в прогнозах. В ориентированной на человека и критической для безопасности области, такой как управление воздушным движением, это критическое свойство обеспечивает понимание ATCO предлагаемых моделей и решений [41, 42].Более того, древовидные ансамбли требуют минимальной предварительной обработки данных и способны подбирать сильно нелинейные данные и обрабатывать большие данные.
3. Обзор
Предлагаемый процесс обучения показан на рис. 1, который включает предварительную обработку данных, извлечение действий ATCO и построение моделей обучения. Четырехмерные точки траекторий для отдельных полетов строятся непосредственно из необработанных данных ADS-B, а пространственная информация об этом секторе собирается и обрабатывается из сборника аэронавигационной информации (AIP).Затем применяются методы предварительной обработки для очистки данных и удаления шумов и траекторий выбросов из необработанных данных. Две точки из каждого полета (первая и последняя точки по временной метке ) использовались для определения новой траектории полета при входе в сектор, отражающей основной ход траектории внутри сектора. Только простые действия извлекаются путем сравнения приведенного выше результата с информацией о полете (скорость, высота и курс) в точке выхода. Их можно рассматривать как изменения в Скорость , Курс и Высота , которые необходимо применять для каждого полета, чтобы достичь точки выхода в заданной четырехмерной позиции (широта, долгота, высота и время).
1, который включает предварительную обработку данных, извлечение действий ATCO и построение моделей обучения. Четырехмерные точки траекторий для отдельных полетов строятся непосредственно из необработанных данных ADS-B, а пространственная информация об этом секторе собирается и обрабатывается из сборника аэронавигационной информации (AIP).Затем применяются методы предварительной обработки для очистки данных и удаления шумов и траекторий выбросов из необработанных данных. Две точки из каждого полета (первая и последняя точки по временной метке ) использовались для определения новой траектории полета при входе в сектор, отражающей основной ход траектории внутри сектора. Только простые действия извлекаются путем сравнения приведенного выше результата с информацией о полете (скорость, высота и курс) в точке выхода. Их можно рассматривать как изменения в Скорость , Курс и Высота , которые необходимо применять для каждого полета, чтобы достичь точки выхода в заданной четырехмерной позиции (широта, долгота, высота и время). До этого момента генерируются два набора: значения действий (непрерывные) и действия ([−1, 0, 1]), которые связаны с путевой скоростью, вертикальной скоростью и курсом для каждого полета. Наконец, используя информацию в точках входа в качестве входных данных и упомянутые два набора в качестве целей, мы строим две группы моделей случайного леса: регрессионные и классификационные модели. Выходными данными этих моделей являются изменения или применяемые действия для каждого заданного полета в его точке входа.
До этого момента генерируются два набора: значения действий (непрерывные) и действия ([−1, 0, 1]), которые связаны с путевой скоростью, вертикальной скоростью и курсом для каждого полета. Наконец, используя информацию в точках входа в качестве входных данных и упомянутые два набора в качестве целей, мы строим две группы моделей случайного леса: регрессионные и классификационные модели. Выходными данными этих моделей являются изменения или применяемые действия для каждого заданного полета в его точке входа.
Отмечая, что в рамках этой работы рассматриваются только три упомянутые группы действий, а такие действия, как проведение или более сложные действия, будут изучаться в дальнейшей работе.Кроме того, в будущей работе будет включено больше информации о дорожном движении, чтобы повысить точность прогнозирования.
3.1. Выбранный сектор
Для целей данного исследования мы определили Сектор 2E, маршрутную зону в районе полетной информации (РПИ) Куала-Лумпура, находящуюся в ведении Сингапурского районного диспетчерского центра (РДЦ), для обеспечения обслуживания воздушного движения с эшелона полета FL120 ( 12 000 90 478 футов 90 479 ) до эшелона полета FL360 (36 000 90 478 футов 90 479 ) включительно. Мы выбрали сектор 2E в РПИ Сингапура, так как он является основным сектором, входящим в ТМА Сингапура, который граничит с тремя границами РПИ: РПИ ХОШИМИН, РПИ БАНГКОК и РПИ КУАЛА-ЛУМПУР.Этот сектор имеет высокую степень управления вектором полета и тактическим управлением траекторией, что делает его естественным выбором для задачи прогнозирования действий диспетчера. На рис. 2 показаны пространственные характеристики выбранного сектора. Для типичного полета до пересечения сектора требуется в среднем около 5 минут. Сектор содержит 8 путевых точек и пересекается 8 маршрутами службы воздушного движения (ОВД). В секторе имеется один перекресток и одна точка схождения на юге сектора (точка пути VMR).
Мы выбрали сектор 2E в РПИ Сингапура, так как он является основным сектором, входящим в ТМА Сингапура, который граничит с тремя границами РПИ: РПИ ХОШИМИН, РПИ БАНГКОК и РПИ КУАЛА-ЛУМПУР.Этот сектор имеет высокую степень управления вектором полета и тактическим управлением траекторией, что делает его естественным выбором для задачи прогнозирования действий диспетчера. На рис. 2 показаны пространственные характеристики выбранного сектора. Для типичного полета до пересечения сектора требуется в среднем около 5 минут. Сектор содержит 8 путевых точек и пересекается 8 маршрутами службы воздушного движения (ОВД). В секторе имеется один перекресток и одна точка схождения на юге сектора (точка пути VMR).
3.2. Набор данных и подготовка данных
Данные ADS-B собираются для региона Юго-Восточной Азии за шестимесячный период (с сентября 2016 г. по февраль 2017 г.). Набор данных содержит три основных погодных условия в Сингапуре: сезон юго-западных муссонов, межмуссонный период и сезон северо-восточных муссонов (таблица 1), которые различаются как по силе, так и по направлению ветра.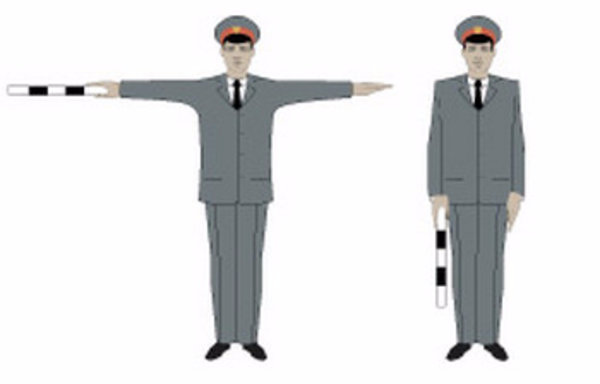 Набора данных достаточно для этого исследования, поскольку он фиксирует все основные циклы погоды и трафика в воздушном пространстве Сингапура.Каждая выборка данных содержит характеристики, как показано в таблице 2, а пример однорядной выборки 4D-данных о траектории показан в таблице 3. Несмотря на то, что наш набор данных недоступен для общественности, аналогичные данные ADS-B для европейского воздушного пространства ( из OpenSky Network или ADS-B Exchange) доступны для применения предлагаемого нами подхода.
Набора данных достаточно для этого исследования, поскольку он фиксирует все основные циклы погоды и трафика в воздушном пространстве Сингапура.Каждая выборка данных содержит характеристики, как показано в таблице 2, а пример однорядной выборки 4D-данных о траектории показан в таблице 3. Несмотря на то, что наш набор данных недоступен для общественности, аналогичные данные ADS-B для европейского воздушного пространства ( из OpenSky Network или ADS-B Exchange) доступны для применения предлагаемого нами подхода.
| ||||||||||||||||||||||||||||
Каждая группа пространственно-несущих записей о траекториях полетов во времени.На рис. 2 показаны траектории 4 различных полетов, проходящих через сектор. Точки выборки одного цвета принадлежат одному и тому же полету, а временной интервал между каждой точкой составляет 15 секунд. Исходный набор данных ADS-B представляет собой большой набор данных с шумами и отсутствующими точками данных. Более того, при заданной пространственной информации сектора 2Е следует рассматривать и исследовать только подмножество траекторий. Таким образом, необходимо применить некоторые этапы предварительной обработки: (1) Поскольку каждый сектор определяется как трехмерный объем, мы применяем трехмерную пространственную фильтрацию, чтобы отфильтровать все траектории, которые не проходят через сектор. На практике пилоты связываются с контроллером D при входе в сектор и с контроллером R при входе в сектор.Траектория самолета имеет сигнатуры действий контроллера как со стороны R , так и со стороны D . Однако действия контроллера на стороне D могут быть идентифицированы в данных о траектории путем наблюдения за траекторией до входа в сектор. Чтобы лучше понять взаимосвязь между действиями диспетчера и данными о траектории воздушного движения, полученными из ADS-B, мы сначала визуализировали данные 4D с помощью ГИС. 4.1. Извлечение значений изменения/действия полета При наблюдении по траекториям полета, как показано на рис. 4.1.1. Скорость полета Во время полета внутри сектора 2E скорость полета обычно меняется. Однако из-за характера этого сектора из данных можно наблюдать три общие и простые тенденции: поддержание скорости, увеличение (увеличение скорости) и снижение (замедление), см. рис. 9. Это указывает на то, что скорость относительной скорости изменение достаточно стабильно и может быть использовано как действие бегства.Из этого наблюдения извлекается скорость изменения и учитывается для следующих шагов обучения. 4.1.2. Вертикальная скоростьДействия, связанные с вертикальной скоростью: аналогично скорости относительно земли, мы также наблюдаем некоторые общие тенденции изменения высоты на основе данных. Вертикальная скорость используется в качестве вертикального действия и рассчитывается просто на основе соотношения разницы высот между точками входа и выхода и продолжительности движения. 4.1.3. Курс Это разница между курсом в точке входа и «курсом в секторе». Поскольку курс полета варьируется по всему сектору, а курс в точке выхода также не отражает направление движения, мы упрощаем определение «курса в секторе» как направления от точек входа и выхода, которое является ожидаемым направлением для полета через наш сектор. Деталь алгоритма экшн-экстракции из точек входа и выхода иллюстрируется в алгоритме 1.
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 deg)
deg) На этом этапе мы отфильтровываем, используя как боковые (граница сектора), так и вертикальные (FL120–FL360) условия. Например, мы обнаружили, что в данных за декабрь 2016 г. через сектор 2E прошел 12 141 полет.(2)Вторая пространственная 3D-фильтрация (аналогичные условия) применяется для фильтрации сегментов траектории за пределами выбранного сектора. Он отделен от первого шага только для гибкости в манипулировании критериями фильтрации. (3) Траектории с выбросами обнаруживаются и удаляются из набора данных, в котором траектории, которые не пересекают боковую границу сектора или имеют значительно большие расстояние и время пути, все считаются аутсайдерами.В контексте нашей исследовательской задачи удерживающие траектории также рассматриваются как выбросы. Это редкие события, которые вносят меньший вклад, чем все данные, но могут значительно повлиять на прогностические модели. (4) Чтобы справиться с отсутствующими точками данных, мы сначала удаляем все траектории полета, которые имеют менее четырех точек данных в секторе.
На этом этапе мы отфильтровываем, используя как боковые (граница сектора), так и вертикальные (FL120–FL360) условия. Например, мы обнаружили, что в данных за декабрь 2016 г. через сектор 2E прошел 12 141 полет.(2)Вторая пространственная 3D-фильтрация (аналогичные условия) применяется для фильтрации сегментов траектории за пределами выбранного сектора. Он отделен от первого шага только для гибкости в манипулировании критериями фильтрации. (3) Траектории с выбросами обнаруживаются и удаляются из набора данных, в котором траектории, которые не пересекают боковую границу сектора или имеют значительно большие расстояние и время пути, все считаются аутсайдерами.В контексте нашей исследовательской задачи удерживающие траектории также рассматриваются как выбросы. Это редкие события, которые вносят меньший вклад, чем все данные, но могут значительно повлиять на прогностические модели. (4) Чтобы справиться с отсутствующими точками данных, мы сначала удаляем все траектории полета, которые имеют менее четырех точек данных в секторе. После этого шага рабочий набор данных содержит 75% полетов от исходных данных. В оставшемся наборе данных по-прежнему отсутствуют данные, из-за чего временной интервал становится несогласованным.Кроме того, для последующей обработки мы стремимся извлечь положение входа и выхода самолетов на границе сектора; затем требуется плотный и согласованный интервал времени в наборе данных. Следовательно, для достижения того, чтобы оставшиеся траектории подвергались повышающей дискретизации (интервал = 1 секунда) с использованием методов интерполяции.
После этого шага рабочий набор данных содержит 75% полетов от исходных данных. В оставшемся наборе данных по-прежнему отсутствуют данные, из-за чего временной интервал становится несогласованным.Кроме того, для последующей обработки мы стремимся извлечь положение входа и выхода самолетов на границе сектора; затем требуется плотный и согласованный интервал времени в наборе данных. Следовательно, для достижения того, чтобы оставшиеся траектории подвергались повышающей дискретизации (интервал = 1 секунда) с использованием методов интерполяции. Наблюдаемое воздушное пространство визуализируется дискретно сетками с длиной и шириной 3 морских мили, действия в той же сетке будут суммироваться, и каждая сетка будет классифицирована на 5 классов с использованием метода классификации естественных границ Дженкса [43], который представляет собой метод кластеризации данных, предназначенный для уменьшения дисперсии внутри классов и максимизации дисперсии между ними.Цвет сетки от желтого до красного означает более высокую частоту появления определенных признаков в позиции, а первый класс не был настроен на визуализацию. На рисунках 3 и 4 показана пространственная плотность точек входа и выхода ВС сектора 2Е, а на рисунках 5–7 показано пространственное распределение воздействий АСТ в секторе. Эти цифры указывают на то, что в действиях ATCO есть закономерности.
Наблюдаемое воздушное пространство визуализируется дискретно сетками с длиной и шириной 3 морских мили, действия в той же сетке будут суммироваться, и каждая сетка будет классифицирована на 5 классов с использованием метода классификации естественных границ Дженкса [43], который представляет собой метод кластеризации данных, предназначенный для уменьшения дисперсии внутри классов и максимизации дисперсии между ними.Цвет сетки от желтого до красного означает более высокую частоту появления определенных признаков в позиции, а первый класс не был настроен на визуализацию. На рисунках 3 и 4 показана пространственная плотность точек входа и выхода ВС сектора 2Е, а на рисунках 5–7 показано пространственное распределение воздействий АСТ в секторе. Эти цифры указывают на то, что в действиях ATCO есть закономерности. 2, наблюдаются множественные изменения траекторий самолетов, когда они пролетают над сектором.Однако полет обычно входит в сектор в определенном районе и должен следовать разработанным маршрутам и точкам пути ОВД, что означает, что все изменения должны применяться для того, чтобы воздушное судно достигло определенного района для выхода из сектора. На рис. 8 представлены некоторые примеры траекторий, проходящих через сектор 2E РПИ Сингапура. Рейсы с одинаковым идентификатором рейса будут делиться своими планами полета, что отражается в схеме их траекторий. Однако с точки зрения позиций входа и выхода из сектора они демонстрируют значительный разброс.Рассеивание может происходить из-за множества факторов, таких как погода или решения диспетчера. Кроме того, еще одним интересным наблюдением является постоянное соотношение между позициями входа и выхода рейсов для продемонстрированного сектора. Предполагается, что ATCO имеет свою собственную схему или стратегию обработки трафика в данном секторе.
2, наблюдаются множественные изменения траекторий самолетов, когда они пролетают над сектором.Однако полет обычно входит в сектор в определенном районе и должен следовать разработанным маршрутам и точкам пути ОВД, что означает, что все изменения должны применяться для того, чтобы воздушное судно достигло определенного района для выхода из сектора. На рис. 8 представлены некоторые примеры траекторий, проходящих через сектор 2E РПИ Сингапура. Рейсы с одинаковым идентификатором рейса будут делиться своими планами полета, что отражается в схеме их траекторий. Однако с точки зрения позиций входа и выхода из сектора они демонстрируют значительный разброс.Рассеивание может происходить из-за множества факторов, таких как погода или решения диспетчера. Кроме того, еще одним интересным наблюдением является постоянное соотношение между позициями входа и выхода рейсов для продемонстрированного сектора. Предполагается, что ATCO имеет свою собственную схему или стратегию обработки трафика в данном секторе. Затем рейсы, которые входят в сектор в определенном регионе, будут направляться в аналогичный регион для выхода из сектора. Таким образом, вместо того, чтобы использовать информацию о плане полета для прогнозирования, мы в основном фокусируемся на использовании позиций входа и выхода для захвата и проверки действий диспетчера управления воздушным движением.Такой подход может фиксировать основные изменения полета в секторе. Из этих пар точек будут извлечены три значения:
Затем рейсы, которые входят в сектор в определенном регионе, будут направляться в аналогичный регион для выхода из сектора. Таким образом, вместо того, чтобы использовать информацию о плане полета для прогнозирования, мы в основном фокусируемся на использовании позиций входа и выхода для захвата и проверки действий диспетчера управления воздушным движением.Такой подход может фиксировать основные изменения полета в секторе. Из этих пар точек будут извлечены три значения: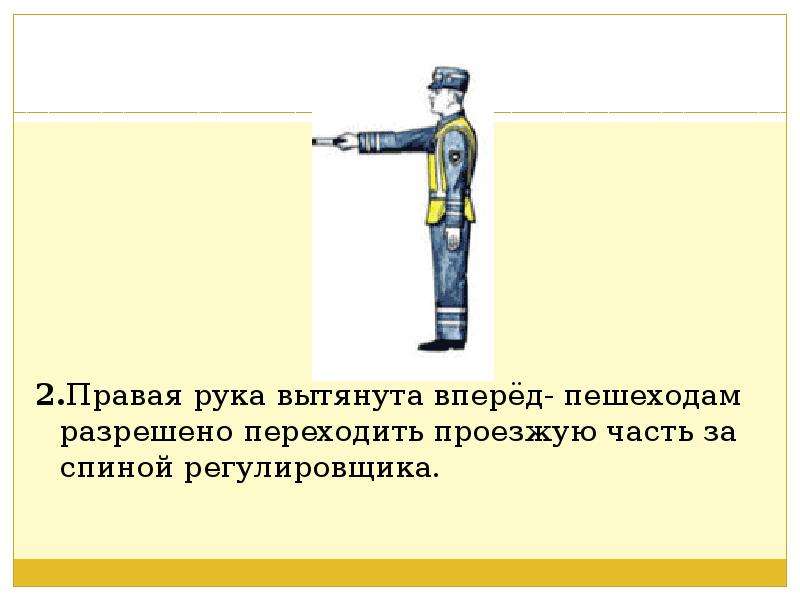 В частности, он рассчитывается на основе оценки необходимой скорости полета с заданной скоростью в точке входа, чтобы добраться до точки выхода. В случае нестабильной путевой скорости расчетную скорость изменения путевой скорости можно рассматривать как среднюю скорость изменения: где — средняя скорость движения самолета по сектору, — общая продолжительность движения, — скорость в точке входа, и — ускорение (коэффициент путевой скорости).
В частности, он рассчитывается на основе оценки необходимой скорости полета с заданной скоростью в точке входа, чтобы добраться до точки выхода. В случае нестабильной путевой скорости расчетную скорость изменения путевой скорости можно рассматривать как среднюю скорость изменения: где — средняя скорость движения самолета по сектору, — общая продолжительность движения, — скорость в точке входа, и — ускорение (коэффициент путевой скорости). Мы используем «Курс» вместо «курс в секторе», потому что он отражает повороты самолетов после входа в сектор.
Мы используем «Курс» вместо «курс в секторе», потому что он отражает повороты самолетов после входа в сектор. Курс
Курс Кроме того, ожидаемое время прохождения сектора составляет 5 мин. Из того и другого выбирается. : из-за погрешности системы измерения высоты для воздушных судов, находящихся на этапе полета по маршруту, зарегистрированные высоты могут иметь некоторое расхождение с их истинными значениями. В [44] из соображений безопасности авторы указали, что эти ошибки составляют менее 2 эшелонов полета (200 футов). Исходя из этого, в этой работе, если абсолютное изменение высоты между двумя точками меньше 100 футов, мы рассматриваем это как поддержание эшелона полета. Кроме того, ожидаемое время прохождения сектора составляет 5 мин.Таким образом, выбирается. Действия набора высоты и снижения в основном распределяются в соответствии с югом и севером сектора, что будет иметь сильное влияние на построение прогностической модели с учетом входной информации о полете. : из-за ошибок навигационной системы, ветра или ряда других факторов, несмотря на то, что самолет сохраняет свой курс, записанный курс также может иметь некоторые отклонения.
Кроме того, ожидаемое время прохождения сектора составляет 5 мин. Из того и другого выбирается. : из-за погрешности системы измерения высоты для воздушных судов, находящихся на этапе полета по маршруту, зарегистрированные высоты могут иметь некоторое расхождение с их истинными значениями. В [44] из соображений безопасности авторы указали, что эти ошибки составляют менее 2 эшелонов полета (200 футов). Исходя из этого, в этой работе, если абсолютное изменение высоты между двумя точками меньше 100 футов, мы рассматриваем это как поддержание эшелона полета. Кроме того, ожидаемое время прохождения сектора составляет 5 мин.Таким образом, выбирается. Действия набора высоты и снижения в основном распределяются в соответствии с югом и севером сектора, что будет иметь сильное влияние на построение прогностической модели с учетом входной информации о полете. : из-за ошибок навигационной системы, ветра или ряда других факторов, несмотря на то, что самолет сохраняет свой курс, записанный курс также может иметь некоторые отклонения. Анализируя данные и учитывая разумные значения ошибки курса, мы выбрали 3 градуса в качестве порога ошибки для этого действия.Тогда, если абсолютная дельта курса меньше 3 градусов, мы считаем это сохранением курса. выбран для кодирования действия курса.
Анализируя данные и учитывая разумные значения ошибки курса, мы выбрали 3 градуса в качестве порога ошибки для этого действия.Тогда, если абсолютная дельта курса меньше 3 градусов, мы считаем это сохранением курса. выбран для кодирования действия курса. Уровень обслуживания сохраняется, но количество образцов для этого действия ограничено, как показано на (f).
Уровень обслуживания сохраняется, но количество образцов для этого действия ограничено, как показано на (f). 1. Метод обучения ансамбля на основе дерева
1. Метод обучения ансамбля на основе дерева Кроме того, способность модели интерпретировать также рассматривается для понимания важных факторов для прогнозирования действий; таким образом, для этой цели подходит метод ансамблевого обучения на основе дерева.В этом исследовании мы рассмотрели два алгоритма: Random Forest (RF) и XGBoost-Extreme Gradient Boosting (XGB).
Кроме того, способность модели интерпретировать также рассматривается для понимания важных факторов для прогнозирования действий; таким образом, для этой цели подходит метод ансамблевого обучения на основе дерева.В этом исследовании мы рассмотрели два алгоритма: Random Forest (RF) и XGBoost-Extreme Gradient Boosting (XGB). Алгоритм будет обучать каждое последующее дерево, используя остатки (разницу между предсказанными и истинными значениями) предыдущих. В этой работе мы используем масштабируемую систему машинного обучения для повышения дерева под названием XGBoost. Он широко использовался в ряде задач машинного обучения и интеллектуального анализа данных с реальными данными в Kaggle и KDDCup.Помимо всех преимуществ алгоритмов повышения дерева, наиболее важным фактором успеха XGBoost является его масштабируемость во всех сценариях.
Алгоритм будет обучать каждое последующее дерево, используя остатки (разницу между предсказанными и истинными значениями) предыдущих. В этой работе мы используем масштабируемую систему машинного обучения для повышения дерева под названием XGBoost. Он широко использовался в ряде задач машинного обучения и интеллектуального анализа данных с реальными данными в Kaggle и KDDCup.Помимо всех преимуществ алгоритмов повышения дерева, наиболее важным фактором успеха XGBoost является его масштабируемость во всех сценариях. Поскольку каждое измерение действий (скорость, вертикаль и курс) имеет разный диапазон значений и может зависеть от разных функций, мы создаем отдельные модели для каждого действия. Шесть регрессионных моделей и шесть моделей классификации разработаны для прогнозирования ценности каждого вида действий.Однако для классификации также разработаны две модели с тремя действиями, использующие Random Forest (RF) и XGBoost (XGB), чтобы изучить потенциал объединения трех моделей в одну для прогнозирования действий. Эти модели рассматриваются для полноты нашего подхода, а не для практических требований, поскольку на практике диспетчер обычно выполняет только одно действие/решение при обработке трафика. (1) Регрессионные модели (RF, XGB): Модель RR1/XR1. : прогноз скорости относительно земли. Модель RR2/XR2: прогноз вертикальной скорости. Модель RR3/XR3: прогноз курса.(2)Модели классификации (RF, XGB): Модель RC1/XC1: прогнозирование действия по скорости Модель RC2/XC2: прогнозирование вертикального действия Модель RC3/XC3: прогнозирование действия по курсу Модель RC4/XC4: прогнозирование всех трех действий.
Поскольку каждое измерение действий (скорость, вертикаль и курс) имеет разный диапазон значений и может зависеть от разных функций, мы создаем отдельные модели для каждого действия. Шесть регрессионных моделей и шесть моделей классификации разработаны для прогнозирования ценности каждого вида действий.Однако для классификации также разработаны две модели с тремя действиями, использующие Random Forest (RF) и XGBoost (XGB), чтобы изучить потенциал объединения трех моделей в одну для прогнозирования действий. Эти модели рассматриваются для полноты нашего подхода, а не для практических требований, поскольку на практике диспетчер обычно выполняет только одно действие/решение при обработке трафика. (1) Регрессионные модели (RF, XGB): Модель RR1/XR1. : прогноз скорости относительно земли. Модель RR2/XR2: прогноз вертикальной скорости. Модель RR3/XR3: прогноз курса.(2)Модели классификации (RF, XGB): Модель RC1/XC1: прогнозирование действия по скорости Модель RC2/XC2: прогнозирование вертикального действия Модель RC3/XC3: прогнозирование действия по курсу Модель RC4/XC4: прогнозирование всех трех действий.
 Метод k -кратной перекрестной проверки (k = 10) используется для оценки, а производительность усредняется для выбора наилучшего набора параметров. Он популярен для решения проблемы переобучения в машинном обучении. Набор данных разбит на десять сгибов, в каждом из которых он используется для тестирования, а остальные используются для обучения моделей. Вычисленные ошибки усредняются для оценки производительности модели в целом.
Метод k -кратной перекрестной проверки (k = 10) используется для оценки, а производительность усредняется для выбора наилучшего набора параметров. Он популярен для решения проблемы переобучения в машинном обучении. Набор данных разбит на десять сгибов, в каждом из которых он используется для тестирования, а остальные используются для обучения моделей. Вычисленные ошибки усредняются для оценки производительности модели в целом. Сравнивая модели двух методов обучения, мы видим, что модели XGB превосходят модели RF в целом по вертикальной скорости и курсу.В то время как для скорости относительно земли они различаются в зависимости от набора данных.
Сравнивая модели двух методов обучения, мы видим, что модели XGB превосходят модели RF в целом по вертикальной скорости и курсу.В то время как для скорости относительно земли они различаются в зависимости от набора данных. 667 для RF и 0,677 для XGB. Модели демонстрируют высокие характеристики (RF: 0,793, XGB: 0,858) для курса и (RF: 0,835, XGB: 0,870) для вертикальной скорости. Модели XGB показали лучшую производительность в прогнозировании по сравнению с моделями RF. Кроме того, как видно из рисунка 15, группы черных точек в нижней части рисунка расположены близко друг к другу, а соответствующие им красные точки пространственно разнесены, что преодолевается рассмотрением особенностей начала и места назначения полета.
667 для RF и 0,677 для XGB. Модели демонстрируют высокие характеристики (RF: 0,793, XGB: 0,858) для курса и (RF: 0,835, XGB: 0,870) для вертикальной скорости. Модели XGB показали лучшую производительность в прогнозировании по сравнению с моделями RF. Кроме того, как видно из рисунка 15, группы черных точек в нижней части рисунка расположены близко друг к другу, а соответствующие им красные точки пространственно разнесены, что преодолевается рассмотрением особенностей начала и места назначения полета. Для модели RR3 (курс) положение входа и курс полета оказывают значительное влияние на курс через выбранный сектор (86%), в котором курс и долгота важнее широты.Функции для информации о дате и времени полета, такие как час дня, день недели и месяц года, вносят небольшой вклад в обученные модели, что также означает, что время года не оказывает сильного влияния на наши прогностические модели. .
Для модели RR3 (курс) положение входа и курс полета оказывают значительное влияние на курс через выбранный сектор (86%), в котором курс и долгота важнее широты.Функции для информации о дате и времени полета, такие как час дня, день недели и месяц года, вносят небольшой вклад в обученные модели, что также означает, что время года не оказывает сильного влияния на наши прогностические модели. . 0
0 Пример процесса настройки для RF-моделей можно увидеть на рисунке 16. Для каждого значения числа оценок производительность модели будет меняться и становиться стабильной с . Количество оценщиков () не влияет на производительность моделей классификации. Таким образом, все модели классификации RF обучаются с [ = 50, = 24], а все модели классификации XGB обучаются с [ = 250, = 8].
Пример процесса настройки для RF-моделей можно увидеть на рисунке 16. Для каждого значения числа оценок производительность модели будет меняться и становиться стабильной с . Количество оценщиков () не влияет на производительность моделей классификации. Таким образом, все модели классификации RF обучаются с [ = 50, = 24], а все модели классификации XGB обучаются с [ = 250, = 8]. Модель с тремя действиями имеет более низкую производительность по сравнению с моделью с отдельными действиями из-за увеличения сложности вывода с 3 измерениями и 27 возможными метками. Хотя прогностические модели для отдельных действий обеспечивают хорошую производительность с высокой точностью, производительность моделей с тремя действиями представлена для полноты результатов. Крайне маловероятно, что диспетчер выдаст три действия одновременно для одного и того же полета. С точки зрения эксплуатационной проверки предлагаемый подход рассматривается как вспомогательный инструмент диспетчера УВД, а не как автономный инструмент.Таким образом, всегда существует элемент усмотрения ATCO, и по мере сбора большего количества действий ATCO модели можно дополнительно обучать для повышения точности.
Модель с тремя действиями имеет более низкую производительность по сравнению с моделью с отдельными действиями из-за увеличения сложности вывода с 3 измерениями и 27 возможными метками. Хотя прогностические модели для отдельных действий обеспечивают хорошую производительность с высокой точностью, производительность моделей с тремя действиями представлена для полноты результатов. Крайне маловероятно, что диспетчер выдаст три действия одновременно для одного и того же полета. С точки зрения эксплуатационной проверки предлагаемый подход рассматривается как вспомогательный инструмент диспетчера УВД, а не как автономный инструмент.Таким образом, всегда существует элемент усмотрения ATCO, и по мере сбора большего количества действий ATCO модели можно дополнительно обучать для повышения точности. Два выбранных метода ансамбля на основе дерева хорошо известны своей низкой вычислительной стоимостью с возможностью параллельных вычислений. Более того, XGBoost специально разработан для работы с большими данными. Что касается времени работы, время обучения выбранной модели варьируется от 40 до 50 секунд для ввода с 25 000 выборок. Все эксперименты проводились на настольном компьютере с процессором Intel Xeron W-2123 CPU 3,6 Гц и оперативной памятью 32ГБ.
Два выбранных метода ансамбля на основе дерева хорошо известны своей низкой вычислительной стоимостью с возможностью параллельных вычислений. Более того, XGBoost специально разработан для работы с большими данными. Что касается времени работы, время обучения выбранной модели варьируется от 40 до 50 секунд для ввода с 25 000 выборок. Все эксперименты проводились на настольном компьютере с процессором Intel Xeron W-2123 CPU 3,6 Гц и оперативной памятью 32ГБ. 83 Или больше в течение следующих 5 минут
83 Или больше в течение следующих 5 минут Затем, используя список предопределенных шаблонов команд, мы можем сгенерировать ожидаемую команду.
Затем, используя список предопределенных шаблонов команд, мы можем сгенерировать ожидаемую команду. Модель для вертикального действия обеспечила самую высокую точность с 99%, тогда как модели для скорости и курсового действия обеспечивают точность предсказуемости 80% и 87% соответственно. Это было связано с очень сложной конфигурацией точек входа и выхода в секторе, что затрудняет обучение. Высокая точность предсказания маневров изменения высоты диспетчером УВД имеет большое значение, поскольку сектор воздушного пространства, используемый в этом исследовании, является переходным сектором (сектор 2E в Сингапурском РДЦ).Переходный сектор обычно представляет собой место, где самолеты набирают высоту до эшелона крейсерского полета или снижаются с эшелона крейсерского полета в конечное воздушное пространство. В таких секторах действия авиадиспетчера по изменению высоты очень важны, так как в этом секторе происходит значительное количество маневров набора высоты и снижения. Модель, предсказывающая совокупность всех 3-х видов действий (многовыходных) для каждого полета, достигла точности 70%.
Модель для вертикального действия обеспечила самую высокую точность с 99%, тогда как модели для скорости и курсового действия обеспечивают точность предсказуемости 80% и 87% соответственно. Это было связано с очень сложной конфигурацией точек входа и выхода в секторе, что затрудняет обучение. Высокая точность предсказания маневров изменения высоты диспетчером УВД имеет большое значение, поскольку сектор воздушного пространства, используемый в этом исследовании, является переходным сектором (сектор 2E в Сингапурском РДЦ).Переходный сектор обычно представляет собой место, где самолеты набирают высоту до эшелона крейсерского полета или снижаются с эшелона крейсерского полета в конечное воздушное пространство. В таких секторах действия авиадиспетчера по изменению высоты очень важны, так как в этом секторе происходит значительное количество маневров набора высоты и снижения. Модель, предсказывающая совокупность всех 3-х видов действий (многовыходных) для каждого полета, достигла точности 70%.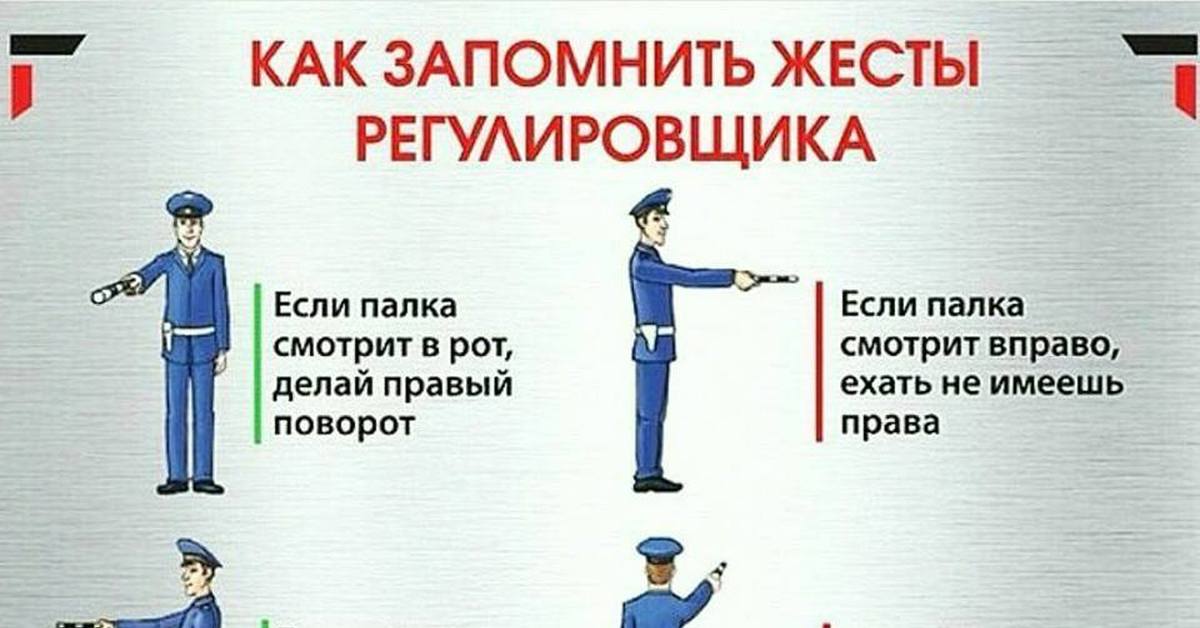 Это означает, что для 70% полетов действия ATCO можно предсказать по всем действиям, используя информацию о полете в точке входа в сектор.Более низкая предсказуемость может быть связана с несбалансированностью обучающих данных для действий контроллера, что приводит к плохой производительности обобщения. Шум и низкое качество данных ADS- B могут быть еще одной областью улучшения, поскольку модель так же хороша, как и данные, используемые для ее обучения. Кроме того, как уже упоминалось, эта работа фокусируется только на прогнозировании простых действий на основе информации о входе в отдельный рейс.
Это означает, что для 70% полетов действия ATCO можно предсказать по всем действиям, используя информацию о полете в точке входа в сектор.Более низкая предсказуемость может быть связана с несбалансированностью обучающих данных для действий контроллера, что приводит к плохой производительности обобщения. Шум и низкое качество данных ADS- B могут быть еще одной областью улучшения, поскольку модель так же хороша, как и данные, используемые для ее обучения. Кроме того, как уже упоминалось, эта работа фокусируется только на прогнозировании простых действий на основе информации о входе в отдельный рейс. Обнаруженные события можно использовать для оценки производительности модели с точки зрения разрешения конфликтов.Затем некоторые методы кластеризации будут применяться ко всем траекториям для обнаружения и извлечения более сложных действий из данных ADS-B. Наконец, для изучения и прогнозирования будут рассмотрены дополнительные функции из сектора и трафика, чтобы улучшить практическое применение этих моделей. Было бы полезно расширить набор функций, включив такие параметры, как погода и ветер; однако при отсутствии метеорологической информации на этом эшелоне полета это усложняет задачу. Тем не менее, мы попытаемся аппроксимировать данные о ветре, экстраполируя приземные ветры (доступные из данных METAR) на большую высоту в качестве нашей будущей работы.Мы также проведем моделирование «человек в цикле», чтобы измерить эффективность предложенного алгоритма, а также сравнить его с традиционными инструментами, используемыми авиадиспетчерами для прогнозирования траектории движения самолета, чтобы лучше понять предсказуемость действий диспетчера УВД.
Обнаруженные события можно использовать для оценки производительности модели с точки зрения разрешения конфликтов.Затем некоторые методы кластеризации будут применяться ко всем траекториям для обнаружения и извлечения более сложных действий из данных ADS-B. Наконец, для изучения и прогнозирования будут рассмотрены дополнительные функции из сектора и трафика, чтобы улучшить практическое применение этих моделей. Было бы полезно расширить набор функций, включив такие параметры, как погода и ветер; однако при отсутствии метеорологической информации на этом эшелоне полета это усложняет задачу. Тем не менее, мы попытаемся аппроксимировать данные о ветре, экстраполируя приземные ветры (доступные из данных METAR) на большую высоту в качестве нашей будущей работы.Мы также проведем моделирование «человек в цикле», чтобы измерить эффективность предложенного алгоритма, а также сравнить его с традиционными инструментами, используемыми авиадиспетчерами для прогнозирования траектории движения самолета, чтобы лучше понять предсказуемость действий диспетчера УВД.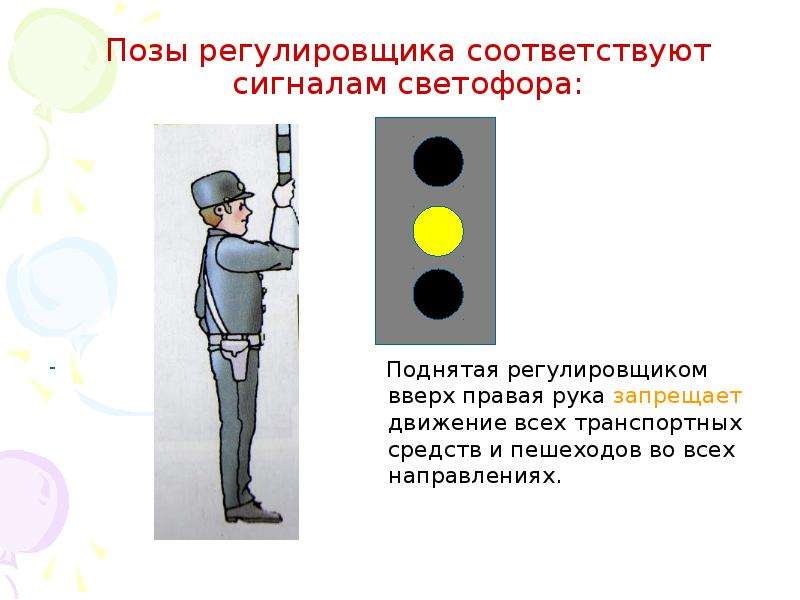


 Карьера большинства отдельных забастовщиков также была мертва: хотя Билл Клинтон отменил запрет Рейгана на забастовщиков в 1993 году, Федеральное авиационное управление когда-либо наняло менее 10 процентов.
Карьера большинства отдельных забастовщиков также была мертва: хотя Билл Клинтон отменил запрет Рейгана на забастовщиков в 1993 году, Федеральное авиационное управление когда-либо наняло менее 10 процентов.
 Во время выступления в местном колледже в Кливленде в мае прошлого года Джо Байден объяснил один из них:
Во время выступления в местном колледже в Кливленде в мае прошлого года Джо Байден объяснил один из них: Затем связь между производительностью и оплатой была разорвана: США в целом продолжали становиться намного богаче, но большая часть возросшего богатства досталась верхушке, а не обычным людям. Руководители корпораций, партнеры в корпоративных юридических фирмах, хирурги-ортопеды — они зарабатывают в три, пять, десять раз больше, чем в 1981 году. Медсестры, пожарные, уборщики, почти все без высшего образования — их зарплата почти не изменилась.
Затем связь между производительностью и оплатой была разорвана: США в целом продолжали становиться намного богаче, но большая часть возросшего богатства досталась верхушке, а не обычным людям. Руководители корпораций, партнеры в корпоративных юридических фирмах, хирурги-ортопеды — они зарабатывают в три, пять, десять раз больше, чем в 1981 году. Медсестры, пожарные, уборщики, почти все без высшего образования — их зарплата почти не изменилась.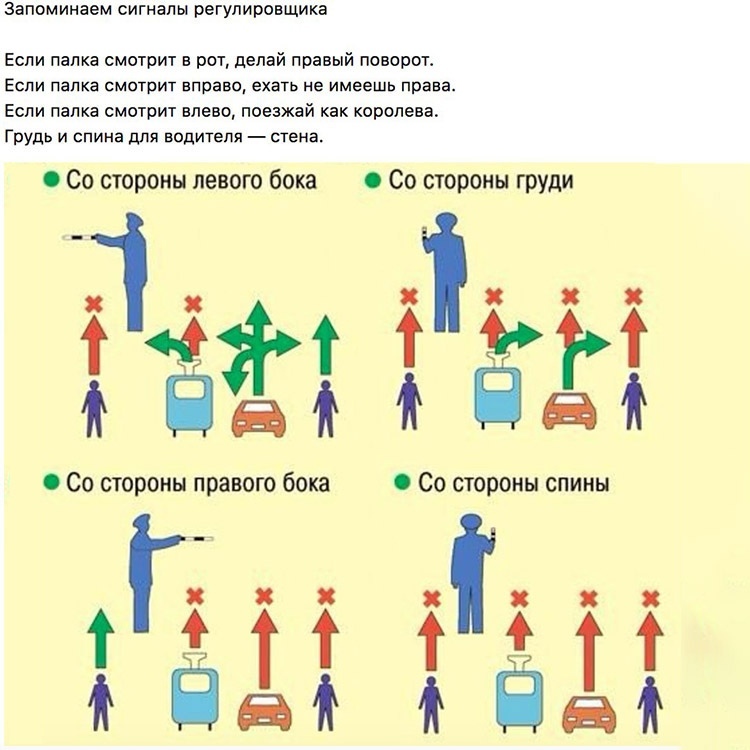 На этом уровне пара, работающая полный рабочий день с минимальной заработной платой, будет приносить домой 96 000 долларов в год. Это кажется невероятным, но нет никаких экономических причин, по которым это не могло бы произойти; мы просто приняли политическое решение, что этого не должно быть.
На этом уровне пара, работающая полный рабочий день с минимальной заработной платой, будет приносить домой 96 000 долларов в год. Это кажется невероятным, но нет никаких экономических причин, по которым это не могло бы произойти; мы просто приняли политическое решение, что этого не должно быть. По данным Министерства труда, с 1947 по 1979 год ежегодно проводилось от 200 до 400 крупномасштабных забастовок. В 1980 году их было 187. Затем, после увольнения PATCO, цифры резко упали. В 1988 году, в последний полный год второго срока Рейгана, было проведено всего 40 забастовок.К 2017 году их было семь.
По данным Министерства труда, с 1947 по 1979 год ежегодно проводилось от 200 до 400 крупномасштабных забастовок. В 1980 году их было 187. Затем, после увольнения PATCO, цифры резко упали. В 1988 году, в последний полный год второго срока Рейгана, было проведено всего 40 забастовок.К 2017 году их было семь.